Sporhunden som lukter mikroalger
Plankton er livsviktig for livet på jorda. Så hva skjer framover når klimaet endrer seg og havet blir varmere? For å kunne telle og overvåke de små dyra får forskere nå hjelp av en smart robot.
Planteplankton i havet er ekstremt viktig for livet på planeten. De omdanner sollys til matenergi, og i samme slengen produserer de rundt halvparten av alt oksygenet vi puster inn.

Planteplankton. Bittesmå og kjempeviktige. Foto: Annecken Nøland
Derfor er det ikke så rart at forskere vil vite hvordan klimaendringer og et varmere hav kan påvirke disse bittesmå, flytende oksygenfabrikkene. Spesielt siden de også er grunnlaget for næringsnettet i havet, og mat for både dyreplankton og fisk.
Men å telle og identifisere plankton er svært vanskelig. Det er som å lete etter milliarder av små nåler i en enorm høystakk, bortsett fra at både høystakken og nålene hele tida beveger seg i det enorme havet.
Nå blir det litt lettere. Et tverrfaglig samarbeid mellom forskere fra NTNU og SINTEF Ocean utvikler en smart robot kalt en «lightweight autonomous underwater vehicle», eller LAUV. Den er programmert for å finne og identifisere ulike grupper av plankton.
Prosjektet AILARON går over fem år. Det fikk 9,5 millioner kroner av Forskningsrådet i 2017. Tidligere i år tok forskere med seg LAUVen ut for å teste den i havet.
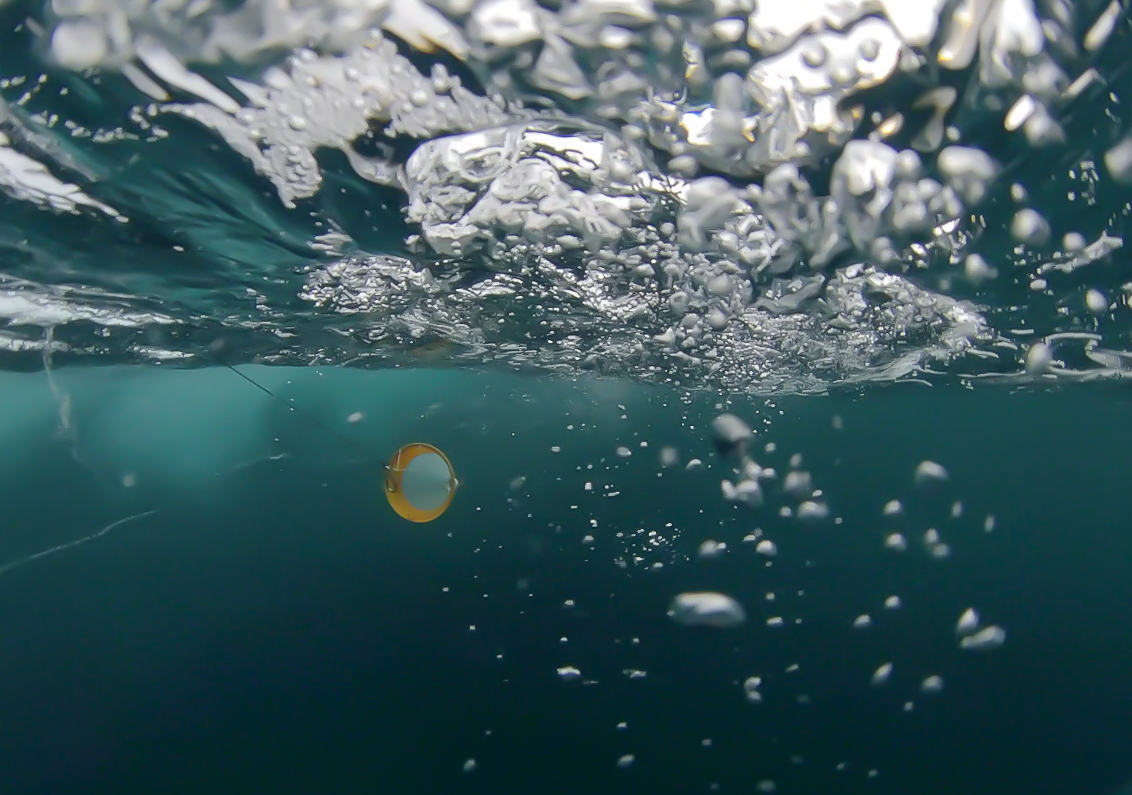
Undervannsfoto av et nett for å fange planteplankton. Foto: Geir Johnsen, NTNU
Bilde, analyse, planlegging og læring
Forskere fra NTNUs institutter for teknisk kybernetikk, marin teknikk og biologi er alle del av samarbeidet.
Tenk på LAUV som en slags robotversjon av en ekte sporhund, men som er spesialist på å finne og identifisere alger, og til og med fortelle hvor de er på vei.
Det spesielle her er at LAUVen bruker alt fra avanserte miljøsensorer, foto, maskinlæring og hydrodynamikk– til planlegging og kunstig intelligens for å lære mens den utfører arbeidet.
Resultatet er at roboten til og med kan anslå hvor de flytende organismene er på vei. Da kan forskerne samle inn mer informasjon om planktonet mens organismene flyter av sted med havstrømmene.
– Vår LAUV øker presisjonen, reduserer måleusikkerhet og gjør oss bedre i stand til å ta prøver av plankton med høy oppløsning, både i rom og tid, sier Annette Stahl, førsteamanuensis ved Institutt for teknisk kybernetikk ved NTNU. Hun leder AILARON-prosjektet.
- Les også: Smart AUV kartlegger planteplankton
Dagens metoder er begrenset og tidkrevende
Å samle inn planteplankton med dagens metoder tar svært lang tid, og kan være dyr.
– Å analysere prøver av planteplankton kan koste ganske mye, sier førsteamanuensis Nicole Aberle-Malzahn ved Institutt for biologi ved NTNU. Hun er med på prosjektet.
Det er spesielt dyrt om analysen skal være nøyaktig med hensyn til rom og tid.

Showets stjerne, roboten som teller planteplankton. Foto: Annecken Nøland
Fordelen med tradisjonelle metoder er at de kan gi mye informasjon, spesielt når det kommer til artsammensetning. Men flesteparten av disse prøvene som er tatt fra båt eller fra stranden, gir bare øyeblikksbilder av rom og tid.
Om informasjonen samles inn via satellitt, gir det et svært stort bilde av det som foregår i havet, uten mange detaljer, og gjelder bare den øverste meteren av havoverflaten.
Her kommer den flytende sporhunden inn.
Robotrevolusjon møter kunstig intelligens
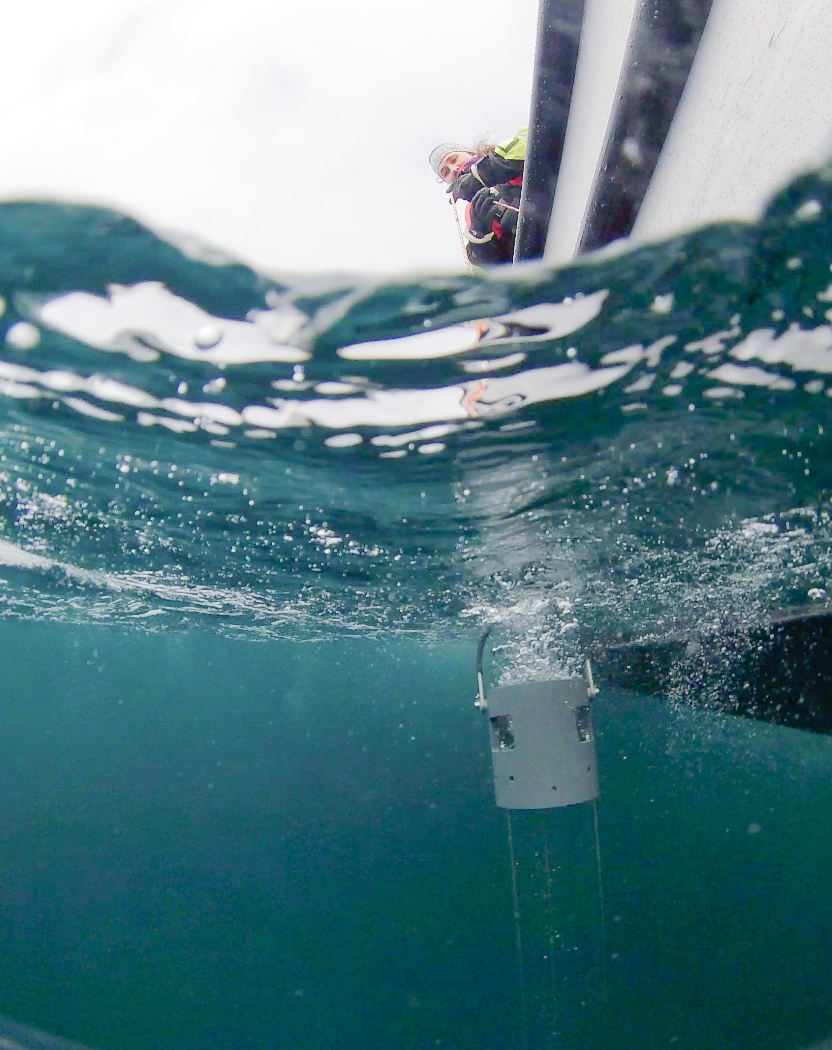
Roboten LAUV ser ut som en liten, tynn torpedo. Den har et kamera som tar bildet av planktonet i de øvre lagene av havet, i et område som kalles den eufotiske sonen. Det er dybden som sollyset kan trenge ned til.
Roboten er også utstyrt med sensorer for klorofyll a, ledningsevne, dybde, oksygen, saltinnhold, temperatur og bevegelser i vannet.

Feltstasjonen på Mausund i Trøndelag. Foto: Annecken Nøland
Nylig samlet en tverrfaglig gruppe seg på den lille øya Mausund i Trøndelag. Her finnes en feltstasjon. Ekskursjonen ble koordinert av Joseph Garrett, postdoktor og forsker ved NTNUs Institutt for teknisk kybernetikk.
Målet var å fange opp våroppblomstringen av planteplankton. Den kommer som en respons på mer sollys, og antallet mer eller mindre eksploderer.
Forskerne ble ledet av professor Tor Arne Johansen ved Institutt for teknisk kybernetikk. De brukte hyperspektrale kameraer i både droner og småfly for å skaffe estimater over planteplanktonmengden. Samtidig brukte de satellittbilder for å få estimater over klorofyll a. Til sist brukte de LAUV og et lag som samlet inn plankton for å følge oppblomstringen i tid og rom.
Forskerne fant planteplanktonets biomasse (antall celler) ved å analysere filtrert sjøvann. Da de hvite filtrene ble brune av lyshøstningspigmenter, visste de at produksjonen av planteplankton i vannmassene var på topp.
Trente sporhunden LAUV
Roboten kan se på bildene og klassifisere dem med det samme fordi den er blitt opplært til å gjenkjenne de forskjellige gruppene av plankton basert på bildene den tar.
Maren Thu tar vannprøver med et apparat som er utviklet ved NTNU. Foto: Geir Johnsen, NTNU
Datamaskinen i den genererer også et kart over biomasse (mengde organismer) og utbredelsen av organismer som sensorene fra roboten detekterte.
Roboten kan også bestemme seg for å returnere til et tidligere sted der den har oppdaget arter av interesse. Her kan forskerne snakke med og gi instrukser til roboten, om det er nødvendig.
Forskere kan også sende direkte instrukser til roboten og endre hvordan LAUV samler inn informasjon. Dette er hvorfor de kaller det en form for sporhund.
Den kan samle inn interessante prøver og lage en oversikt over volumer. Så kan et forskningsskip komme inn og gjøre oppfølgingsprøver.
Informasjonen fra sensorene kan hjelpe til med å bestemme utbredelsen og volumet av bestemte vesener før den går videre.
LAUV kan forutsi hvor strømmene går
Plankton følger vannmassene passivt. Det betyr at forskerne må vite hva som skjer med disse havstrømmenes hastighet og retning.
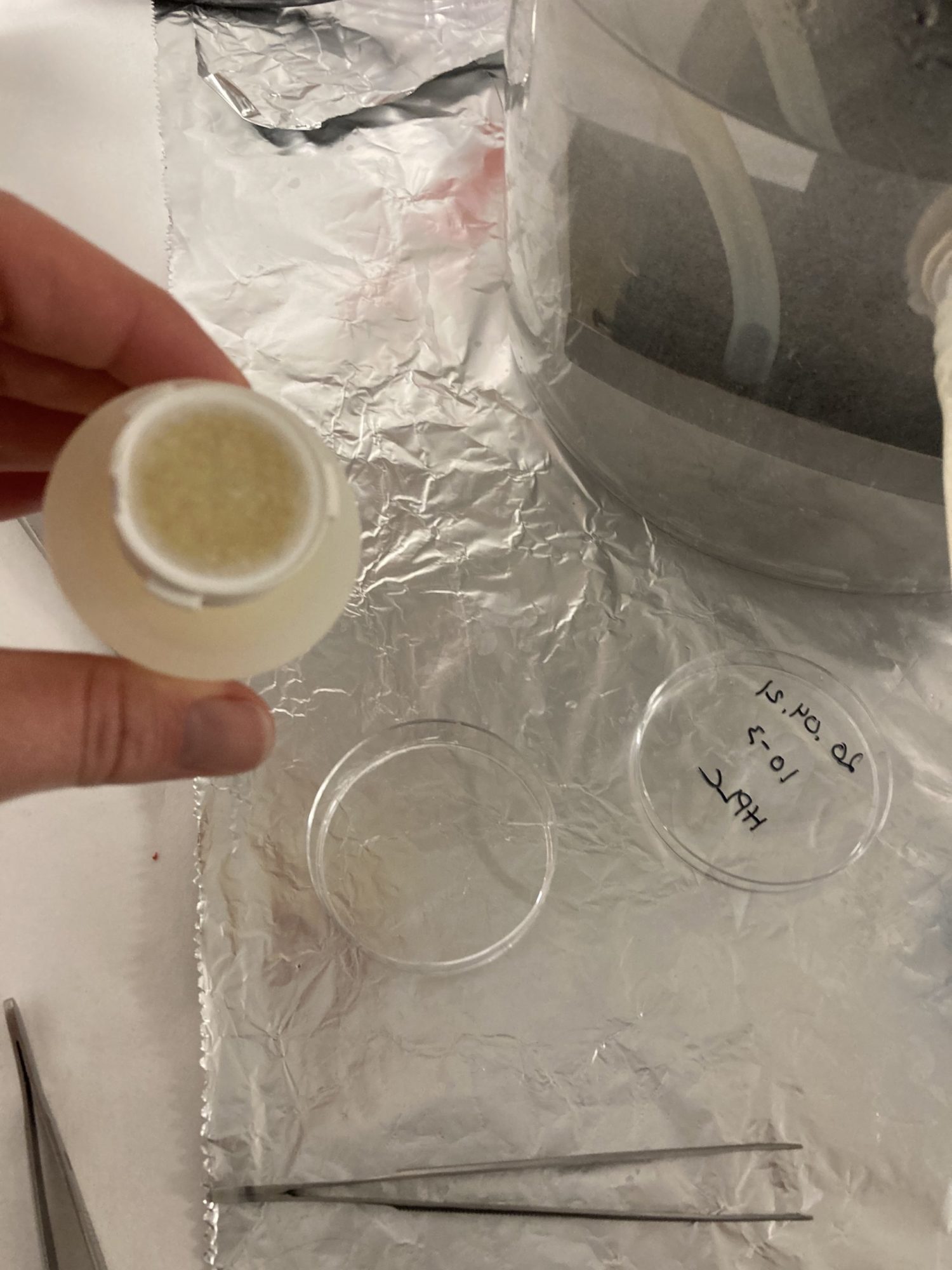
Forskere filtrerer vannprøver for å se om oppblomstringen av alger er i gang. Foto: Annecken Nøland
LAUVen har utstyr som gjør den i stand til å lage et anslag over lokale havstrømsmønstre ved ulike dyp. Deretter kalkulerer den en modell som gjør den i stand til å forutsi hvor planktonet er på vei, og som kan hjelpe roboten til å bestemme hvor den skal dra etterpå.
Prøvetakingen og prosesseringen av bilder repeteres og raffineres. Roboten lærer av denne prosessen. Den er som en sporhund som trenes tusenvis av ganger.
Det overordnede målet for roboten er å greie å greie å oppsøke steder med mye oppblomstring etter at den først har utført en mer overflatisk undersøkelse av området.
– Målet for oss er å forstå strukturer og spredning i vannmassene, sier Stahl. – Å bruke roboten gjør oss i stand til å samle inn denne informasjonen.
LAUV kan operere opptil 48 timer, så den kan gi en god oversikt over tid.
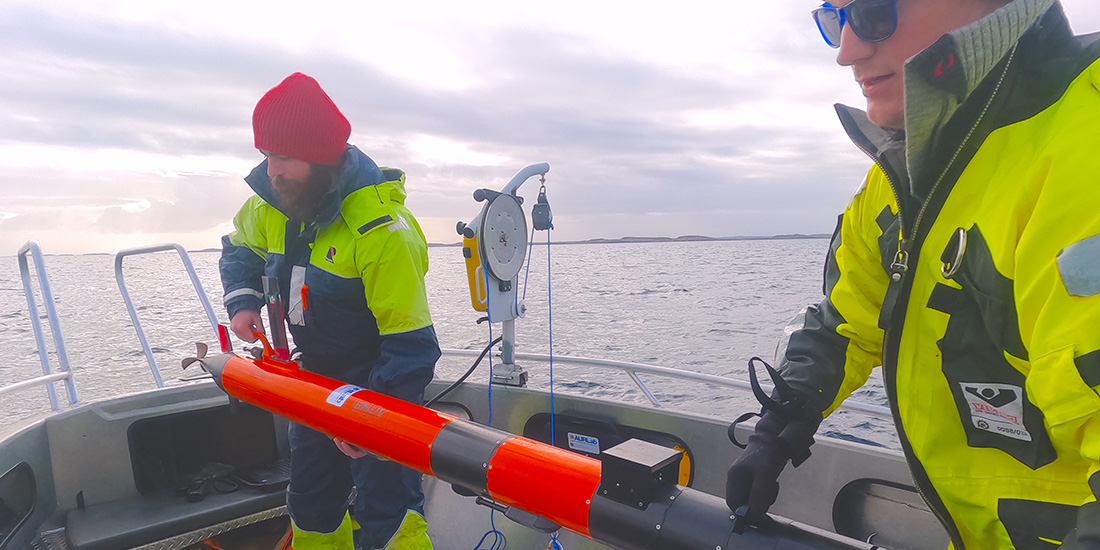
David Williamson og Andreas Våge gjør klar LAUVen utenfor Mausund. Foto: Aya Saad
Mange detaljer i tid og rom
Stahl sier at det å bruke LAUV-teknologi hjelper til med å anslå de biologiske, fysiske og kjemiske omstendighetene i et bestemt område med høy presisjon i tid og rom.

Annecken Nøland tar vannprøver. Foto: Maren Thu
– Vi kunne aldri ha oppnådd en sånn grad av nøyaktighet ved hjelp av tradisjonelle metoder, sier Stahl.
– Prosjekter som AILARON kan dermed hjelpe oss med å få mer kunnskap om status i økosystemet og øke mulighetene for å overvåke økosystemet og forvaltning under havforholdene i framtida.
Professor Geir Johnsen er enig. Han er marinbiolog ved Institutt for biologi, og en sentral forsker ved NTNUs Autonomous Marine Operations and Systems (AMOS).
– Vi ønsker å få en oversikt over utbredelsen av arter, biomasse og helsestatus som en funksjon av tid og rom, sier han. – For å få til dette må vi bruke undervannsroboter med avanserte instrumenter.
Referanse: Saad, A., A. Stahl, A. Våge, E. Davies, T. Nordam, N. Aberle, M. Ludvigsen, G. Johnsen, J. Sousa, and K. Rajan. 2020. Advancing ocean observation with an AI-driven mobile robotic explorer. Oceanography 33(3):50–59, https://doi.org/10.5670/oceanog.2020.307.