Robotbarna
Hjernen deres er som hos en ettåring. Forskerne ønsker å få dem opp på tenåringsstadiet. Minst.
Problemene står i kø. Og vi eksperimenterer med ulike teknikker. Erik Kyrkjebø setter hendene i siden og ser ned. På gulvet foran oss ligger Aiko, Anna Konda, PiKo og Kulko.
– Håpet er at vi skal få dem til å ta imot informasjon, behandle denne, bruke den til å lage bevegelse, og lære én gang for alle. Det har vi ikke klart ennå, sier Kyrkjebø.
Anna Konda ligger og ruver i rødt og hvitt. Like ved lyser den blanke issen til Aiko. Den sju kilo tunge krabaten orker ikke løfte hodet i dag. PiKo er delvis gjemt borte i kroken. De ser uskyldige nok ut. De ligger ganske så stille. Og de hører definitivt ikke etter hva som blir sagt.
Slangerobotikk i verdensklasse
Det finnes en japansk guru. Og så er det et knakende godt miljø i USA. Men bortsett fra dem er NTNU og SINTEF blant de beste i verden når det gjelder slangerobotikk.
– Vi er størst i Norge på dette feltet. Over 20 personer jobber på området robotikk som er et satsingsområde her på SINTEF IKT, opplyser kollega Ingrid Schjølberg.
Hun forteller om avanserte roboter innenfor vareproduserende industri. Roboter som griper og løfter, flytter og henter. Om helserobotikk som kommer som et nytt felt, og der robot-assistenter kan bidra til at eldre kan bo lengre hjemme. Men først og fremst er avdelingen opptatt av servicerobotene. De som er rettet mot inspeksjon og vedlikehold. Som ikke skal produsere noe, men utføre tjenester som vi mennesker har problemer med.
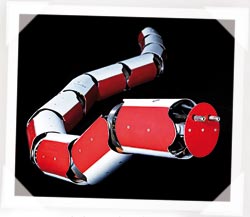
Anna Konda (5 år) er familiens mor.
Foto: Geir Mogen
– De skal for eksempel inn i rør for å finne feil. Komme til på rare plasser. Eller farlige – som ved brann. Vi er litt giret på dette med rør og inspeksjon i rør. Tror på et marked her.
– Hva er visjonen og ideen bak?
– Om vi snakker generelt om robotisering, så ligger norsk industri sørgelig bak andre land. Sverige satser dobbelt så mye på automatisering som vi. Land som India og Kina har begynt å robotisere. Vi må skaffe rekruttering til robotfaget og sørge for hjelp til konkurranseutsatt industri, sier Ingrid Schjølberg.
– Slangene gir oss spisskompetanse på motorsystemer og hvordan mekaniske og elektriske enheter kan sys sammen. Vi satser på å bygge opp kjernekompetanse og lage en plattform med styresystemer som kan benyttes uansett bruksfelt, sier Kyrkjebø.
Mor i familien
Det startet med Anna Konda. Nyheten om slangeroboten fra SINTEF som kunne redde liv, gikk sin seiersgang i mediene våren 2005. Kinesiske, amerikanske og brasilianske aviser og nettsteder skrev om den norske roboten som kunne klatre opp trapper, forsere bjelker og sno seg rundt hjørner. Alt for å kunne utføre livbergende operasjoner ved brann og eksplosjoner.
Bak prototypen av den første slangeroboten lå det en diplomoppgave og halvannet år med jobbing i kybernetikkmiljøet ved NTNU/SINTEF. I etterkant har dette gitt seg utslag i flere doktorgradsarbeider på området, og professor Kristin Pettersen ved NTNU har spilt og spiller en vesentlig rolle her.
«Å gripe et objekt er en enkel aktivitet for et menneske. Å programmere dette og overføre det samme til en robot, er verre.»
Forsker Erik Kyrkjebø
Anna Konda hadde 20 hydrauliske motorer som beveget leddene i den 75 kilo tunge kroppen. Like mange ventiler styrte vannstrømmen til motoren. Hver modul besto av to hydrauliske sylindere og to ventiler. Utenpå alle leddene lå et skjelett av stål. Også her var det leddmoduler med bevegelighet om to akser.
– Vi utviklet Anna Konda for å demonstrere SnakeFighter-konseptet. Hun er, så langt vi kjenner, verdens største og sterkeste slangerobot, og også den første vannhydrauliske slangeroboten som noensinne er laget, sier Erik Kyrkjebø stolt.
– SnakeFighter-konseptet?

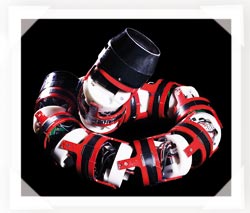
Minstemann Kulko har potensial til å utnytte hindringer og ta egne beslutninger.
Foto: Geir Mogen
– Prosjektet fikk dette navnet, ja. Det skriver seg fra spørsmålet som en tidligere kollega rettet til oss: Hvorfor kunne vi ikke lage en brannslange som krøp inn i et brennende hus og slukket en brann på egen hånd? I mangel av et godt svar bestemte vi oss for å gjøre nettopp det.
Brannslange med vannhydraulikk
Idéen til forskerne var å utstyre en brannslange med vannhydraulikk. Kraften i den sterke vannstrømmen ville få brannslangen til å kunne bevege seg på egen hånd. Og fordelen med en slangerobot framfor en robot med hjul eller bein, ville være robustheten og framkommeligheten i vanskelige miljø.
Fortsatt – fire år etter – har forskerne ikke nådd målet, men har stor tro på konseptet bak Anna Konda.
– Det geniale med Anna Konda er at energien som slangeroboten trenger for å bevege seg, allerede finnes inne i brannslangen: et vanntrykk på 100 bar. Og i tillegg er jo vannet selve slukkemiddelet, forklarer Kyrkjebø.
Eksperimentering
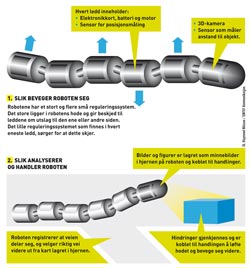
Robotene i Trondheim er som store reguleringssystem, og får kraften sin fra strømkabler og/eller batteri. Det store systemet styrer robotens totale bevegelser, mens mange små reguleringssystemer styrer de enkelte robotleddene. Hvert enkelt ledd i roboten har en liten elektromotor og et kretskort som leser av informasjon fra omverdenen. Leddene er koblet sammen, og hver modul kan kommunisere med de andre modulene.
– Det vi vil roboten skal gjøre, mater vi inn i kretskortene, sier Schjølberg. – Vi lager en ligning for den totale bevegelsen, og en for de små systemene der vi angir hastighet og posisjon til leddet.
– Ja, men vi bruker også feedbacken fra roboten til videre styring, supplerer Kyrkjebø.
– Det er forskjellen mellom hva roboten har gjort og hva vi ønsker at den skal gjøre, som gir oss størrelsen på motorkraften, om du skjønner..?
– Nei…?
– Det blir som om du kjører bil i 70 km/t og tenker at du vil opp i 80 km/t. Da må du opp med motorkraften og trykke på gasspedalen.
Smartest blant de dumme

Piko (1 år) klatrer i vertikale rør.
Foto: Geir Mogen
I løpet av fire år – fra 2005 og til i dag – har én slangerobot blitt til tre–fire. Familien har oppstått fordi forskerne trengte mer kunnskap som kunne tilbakeføres til den opprinnelige roboten.
Aiko kom til verden for å finne ut hva Anna Konda trengte av elektronikk og for at det skulle være lettere å drive eksperimentering. Å traktere sju kilo er noe annet enn 75 kilo. Lenge var Aiko en plattform for å teste ut at de matematiske ligningene fra det store til det lille systemet fungerte, men så var grensene nådd for læring. Nå er det Kulko som har kommet til for å kunne sette det samme ut i livet.
Kulko er ikke riktig så dum som de andre, som Erik Kyrkjebø uttrykker det. Det innebærer at roboten har kraftsensorer på seg som måler all kontakt med omgivelsene. Slik kan den tilpasse framdriften sin i forhold til det den «føler», og den har potensial til å bli mer intelligent og lære å ta egne beslutninger, ifølge oppdragerne.
Klatreroboten
PiKo er roboten som har lært forskerne det meste om vertikal bevegelse. Den klatrer i rør. Og i loddrett leie skrur den seg oppover en rørvegg. Kybernetikere har jobbet med framdriftssystemet. Optikkforskere har laget «synet» til den lille roboten.
PiKo skiller seg fra resten av slangefamilien ved at den går på hjul. Men i likhet med søsknene sine er også han leddet.
– Slangerobotene har gjort oss gode på å styre mekanismer som er leddete, kommenterer Kyrkjebø, – men i tillegg må vi ha eksperter som kan hjelpe til med syn. Da samarbeider vi med Avdeling for optiske målesystemer og dataanalyse og får hjelp fra dem.
Aiko (4 år) har testet ut matematiske ligninger.
Foto: Geir Mogen
– PiKo skal kunne rengjøre ventilasjonssystemer og sjekke lekkasjer i rør ned til 20 cm i diameter – både de loddrette og i forgreininger, forklarer Jens Thielemann. – Så langt har vi greid å få til framdriftssystem, og et 3D-kamera kombinert med kart og posisjonsgjenkjennelse gjør at den – som oss – kan sammenligne syn og kart for å se at den er på rett vei.
– Kan den endre bevegelse og framdrift ut fra synet?
– Vi har greid å koble framdrifts- og synssystem, men ennå ikke greid å lagre dette så roboten kan lære noe nytt.
Læring
Det er en lang vei å gå, fra å være en robot til å bli en robot med intelligens. Å gripe et objekt er for eksempel en enkel aktivitet for et menneske. Å programmere dette og overføre det samme til en robot, er verre.
– Roboten trenger seks grader av «frihet» eller bevegelighet, skisserer Kyrkjebø. –Bredde, høyde, opp, ned, venstre og høyre. Når vi griper rundt et dørhåndtak må vi for eksempel kunne vri og rotere handa.
– Det er ikke nok at roboten bare skal kunne bevege seg framover og forsere hindre. Den må også kunne ta seg fram selvstendig i omgivelsene, sier Ingrid Schjølberg.
– Hvordan greier dere det?
– Da må vi gi roboten visuell informasjon gjennom kamera og sensorer.
Det roboten fanger opp av synsinntrykk her og nå, må den kunne sammenligne med bilder og minner i «erfaringsbasen» sin – en liten database i slangehodet som har minne, beslutning og sensortolking. Det kan være en handling roboten har trent på, et kart eller bilder av linjer og geometriske figurer som forskerne har lagt inn.
I databasen kobles slike bilder til en handling. Når roboten sjekker: Har jeg sett dette før? – og svaret er ja – så skjer det samtidig en handling.
– Det blir som når vi mennesker ser en dør. sier Kyrkjebø. – Av erfaring vet vi at vi skal trykke ned håndtaket. Selv om dørene ser ulike ut og håndtaket er plassert langt oppe eller nede, vet vi at samme handling skal til. En svingdør må vi kanskje teste ut første gang vi støter på den, men etter en kort læringsprosess er den også ok. Slik skal læringen skje hos robotene også.
Diger, oransje robotarm
Illustrasjon: Raymond Nilsson/SINTEF Kommunikasjon
Robotmiljøet på NTNU/SINTEF er mer enn slanger. Nede i et kjellerlaboratorium i en av elektroblokkene på Gløshaugen sitter Pål Liljebäck foran en håndfull fargerike pc-skjermer. Bak skjermene er en glassvegg, og innenfor glasset beveger en diger, oransje robotarm seg sakte omkring.
StatoilHydro har finansiert en større robotlab ved SINTEF og NTNU for å få utviklet et nytt konsept for en fjernstyrt olje- og gassplattform innen 2015. Om noen år kan en lignende arm og robotsystem som dette befinne seg på en ubemannet oljeplattform i Nordsjøen.
For to år siden ble det opprettet et såkalt Geminisenter for avansert robotikk på Gløshaugen. Senteret skal fokusere på det beste innen robotikk og har knyttet til seg seks professorer og femten forskere.
– I år fikk vi tildelt et stort prosjekt av Norges forskningsråd, «Next generation robotics for Norwegian Industry», forteller Ingrid Schjølberg.
– Det fine med slangene våre er at de gir oss verdifull kunnskap både på motorsystemer og materialteknologi, avrunder Erik Kyrkjebø.
– Vi er naturligvis robotenes læremestre, og de gjør stort sett det vi har planlagt de skal gjøre. Men det er som med unger: Man får mye verdifull kunnskap tilbake gjennom samværet!