Roboten som klatrer i rør
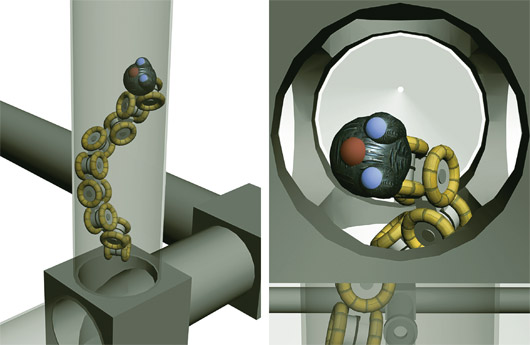
En robot som kan ta seg fram og inspisere kompliserte rørsystemer, er under utvikling. I loddrett leie skrur roboten seg oppover rørveggen.
Rørsystemer ute i industrien er utilgjengelige og trange. I tillegg kan rørene være loddrette og ha forgreininger. Like fullt må lekkasjepunkt oppdages i vannsystemer, tilstanden må sjekkes i olje- og gassrør, og ventilasjonssystemer må rengjøres.
Dagens roboter er stort sett uintelligente. De kan verken navigere eller klatre i vertikale rør. Bare få har aktive ledd.
Dette vil kybernetikk- og optiske målefors – kere ved SINTEF gjøre noe med.
NAVIGASJON MED LYS OG BILDER Med utgangspunkt i erfaringer og kompetanse som allerede er bygd opp rundt slangerobotene Anna Konda og AiKo, er et team nå i gang med å utvikle en intelligent rørinspeksjonsrobot på hjul som skal kunne klatre, forsere kryss – og til enhver tid vite hvor den befinner seg i røret. Inspeksjonsroboten skal kunne bevege seg i rør av ulik diameter ned til 20 cm. Kyber – netikere jobber med framdriftssystemet, mens en gjeng med optikkforskere utarbeider synssystemet til den nye roboten.
– Foreløpig er vi på et stadium der vi prøver å samle inn data fra rør for å kunne analysere, forteller forsker Jens Thielemann på SINTEF.
– Her bruker vi legoroboten Lille Mindstormer som har tilkoblet et kamera og som flytter seg rundt i røret etter et ferdig programmert veikart. Neste steg blir å bruke disse dataene som input til å styre selve roboten vi skal lage.
Kameraet som skal utgjøre synet til roboten, er et hyllevare time-of-flight-kamera som gir et dybdekart av rørsystemet ved hjelp av modulert lys.
– På det viset kan roboten navigere og finne fram selv, sier Thielemann. – Roboten vet at nå kommer det en sving til høyre eller til venstre, og har samtidig innebygd en liste over hva den skal foreta seg i de ulike situasjonene.

MEDHJELPER: Jens Thielemann benytter lego-roboten «Lille Mindstormer» i forberedelsene til den endelige roboten. Foto: Kristin Svorte
FUNGERER SOM ET TOG – Det tidligere arbeidet vårt med slangerobotene har gjort oss gode på å styre mekanismer som er leddet, sier SINTEF-forsker og kybernetiker Erik Kyrkjebø. – Nå ønsker vi oss en robot på 10-11 ledd med hvert sitt identiske hjul-par støpt i plast. Vekta må fordeles godt på leddene – for eksempel kan vi putte kamera og akselerometer i to ulike ledd. Roboten vil fungere som et tog når man kjører horisontalt. Slike roboter finnes allerede, men vi ønsker at vår robot også skal kunne klatre. Forskerne har designet flere versjoner av rørinspeksjonsroboten og prøvd ut ulike løsninger for å få roboten både bevegelig og kompakt. Nå har de kommet fram til et design de har tro på.
SKRUR SEG OPPOVER – Når roboten skal inn i et loddrett rør, løfter den «hodet» inn i røret og treffer rørveggen. Så kan den enten kjøre sidelengs med buken mot røret og skru seg oppover, eller den kan bikke seg bakover, spenne seg fast mot rørveggen på samme vis som vi vil sette beina mot sjaktveggen for å holde oss fast, og rulle oppover.
– Forskerne presiserer at de er på designstadiet. I juni skal to av de elleve leddene testes ut for å verifisere konseptet, og innen slutten av året håper de å demonstrere en prototyp. Dette utgjør bare fase én i en industriutvikling, men de entu – siastiske forskerne er sikre på å lykkes i overskuelig framtid. Den endelige roboten er tenkt i aluminium og med en planlagt størrelse på minimum 1,5 meters lengde.
Åse Dragland




