Bedre grep om maten
Robothåndtering av skinke, steik og fiskebiter skal kutte kostnader for næringsmiddelindustrien.
Utsiktene for norsk foredlingsindustri har lenge vært dystre. Lønnsomheten i næringa er generelt lav, og eksporten av råstoff som foredles i lavkostland, er stor. Verdiskapingen forsvinner dermed ut av Norge, og industrien har behov for å demme opp for dette.
Forskere ved SINTEF-avdelingen Produkt og produksjon har lenge jobbet med å utvikle gripere for automatisert håndtering av porsjonsbiter med fisk, skinker og steiker i produksjonslinja. Automatisering og bruk av roboter handler om at bedriftene kan bearbeide og få foredlet et større kvanta med råvarer, og dermed oppnå bedre lønnsomhet.
Konkurransedyktighet
Når fisk skal pakkes, er veien lang med en rekke manuelle håndteringer – fra fisken plukkes opp fra kar til den ligger ferdig i emballasjen. Fisken løftes fra kar til transportband der en person legger den klar for sløyemaskin. Nestemann tilrettelegger for hodekapping, og så følger filetering og trimming (ta ut blodflekker og fett). Endelig legges fisken på transportband for fjerning av skinn og ekstra trimming. Nye hender leder den inn i porsjonskutter, og en rekke operatører legger så porsjonsbitene ned i pakkemaskinen.
– En omlegging mot automatisering har gjerne en negativ klang for mange arbeidstakere siden dette innebærer en lavere grad av operatører ved samlebandet, sier forskningssjef Jan Buljo. – Men vi tror at det også handler om å legge til rette for operatører og å få til en rasjonell produksjon. Til syvende og sist er det bedre å gjøre bedriften konkurransedyktig enn at den legges ned og at videreforedlingen flyttes utenlands. I tillegg vil minimal håndtering av produktene også bety at hygiene og kvalitet på produktet blir bedre.
Nålegriper
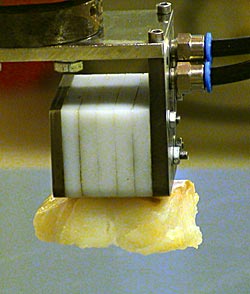
MINI-GRIPER: Prototyp av en nålegriper i mini-utførelse beregnet på små porsjonsbiter av fiskefilet.
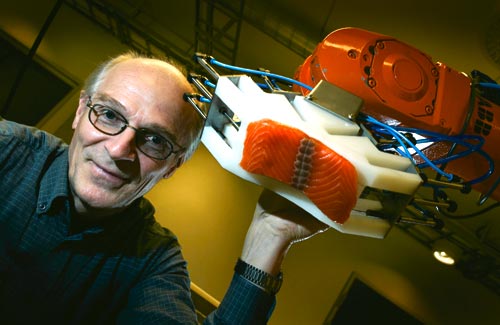
Forskerne har utviklet en såkalt nålegriper som monteres ytterst på robotarmen. Produktet har nåler i rekker som er skråstilt i forhold til hverandre. Når en filet eller en skinke gripes, får man dermed flere nålekryss inn i objektet, som gir et godt grep.
– Nålekrysset fungerer nesten som en fiskekrok – selv om det ikke finnes mothaker her, sier Buljo.
Prototypen er patentert i Norge og er under patentbehandling i andre land. Nå testes den i laboratorium der den danner grunnlag for videreutvikling. Blant annet sjekker forskerne hvor stor kraft (akselerasjon) de kan påføre objektet uten at griperen mister taket – og de ser på hastigheter og hvor raskt og presist forflytninger kan gjøres.
Selv om nålegriperen primært er utviklet med tanke på filet og skinke på transportbandet, ser forskerne for seg andre griperkonsept for å håndtere rund fisk når den skal sløyes, hodekappes og fileteres. I ulike sektorer av næringsmiddelindustrien vil det være behov for gripere som er utviklet for ikke-stive objekter, enten det er innen kjøttsektoren med storfe, fjørfe og svin – eller det er innen fiskeforedlingsindustrien. Dette er utfordringer som forskerne på SINTEF-avdelingen ønsker å arbeide med framover.
Under patentering
Buljo og kollegene hans er nå i ferd med å utvikle tre andre aktuelle gripeanordninger med spesielle egenskaper som utfyller hverandre med tanke på bruksområde. Hvis flere gripehoder settes sammen, kan for eksempel en hel fisk løftes. Disse griperne er utviklet designmessig med tanke på strenge hygienekrav som gjelder i matvareindustrien, og har blitt testet med meget lovende resultater. Ideene er fortsatt under patentering og kan gi næringsmiddelindustrien helt nye muligheter for å øke sin konkurransekraft.
Av Åse Dragland

