Hvor er jeg – og hvor skal jeg?
Vi mennesker har evne til å orientere oss i et rom eller et landskap. En robot har ingen anelse.
En liten, tallerkenlignende støvsuger durer rundt på gulvet i enkefru Larsens blokkleilighet. Den startet midt på gulvet og har nå jobbet seg ut i spiraler som blir stadig større. Hver gang den dunker borti et stolbein, rygger den litt ut på gulvet igjen – og fortsetter.
Støvsugingen kan virke noe tilfeldig. Som om den lille tykkasen på gulvet tenker: Gjør jeg dette lenge nok, har jeg sannsynligvis tatt hele området.
Mangel på enkle, rimelige løsninger
– Det er nok ikke så langt fra sannheten, bekrefter forskerne Sigurd Fjerdingen og Johannes Tjønnås på SINTEF.
– Serviceroboter som opererer innendørs, har litt problemer med å vite hvor de er, og hvor de skal.
Forskningsmiljøet opplever at både gründere og små bedrifter etterspør roboter – som kan flislegge store arealer eller fungere som automatiske boresystemer i bygg. Det samme gjør industrien som produserer velferdsteknologi for eldre. Dagens løsninger blir stort sett altfor dyre.
Derfor vil Tjønnås og Fjerdingen se på mulighetene for å finne andre og enklere måter å gjøre dette på.
Ute greit
Posisjonering kaller forskerne det. Det er metodikken som er knyttet til å identifisere posisjon og plassering av en gjenstand på kartet.
En båt, et fly eller en utendørs gressklipper har ikke vår evne til å resonnere, men da hjelper for eksempel GPS med å finne fram. Det systemet består av 24 satellitter som går i seks forskjellige baneplan rundt jorda.
– Prinsippet er avstandsmåling fra punkt med kjent posisjon, forklarer Sigurd Fjerdingen. – Og mottakeren trenger å ta inn signaler fra tre satellitter for å være nøyaktig.
I smale bygater der det skygges for deler av himmelen, kan nøyaktigheten dermed bli dårligere.
– Om plenklipperoboten bare hadde basert seg på GPS og kommet bak et hus som skygget, ville den fått problemer. Plenen kunne endt opp med å se ut som den var klippet av en full mann, men vanligvis har slike klippere også andre sensorer og systemer som hjelper dem.
- Les også om roboter på skolebenken
Innendørs trenges et koordinatsystem
De fleste mennesker i vår del av verden er imidlertid innendørs det meste av døgnet, og så fort man kommer inn, får man ikke mye hjelp fra GPS-systemet.
– Navigerende husroboter som ikke driver med tilfeldig vasking og støvsuging, eller som skal assistere og stimulere eldre til sosial trening, må bli fortalt hvor de skal gå, og hva de skal gjøre. Hvis ikke blir de stående bom stille, sier Tjønnås.
Så hvordan få til dette? Ifølge forskerne kan en robot orientere seg om den har et koordinatsystem og kan utføre handlingene i forhold til dette.
Slik styrer man en innendørs robot:
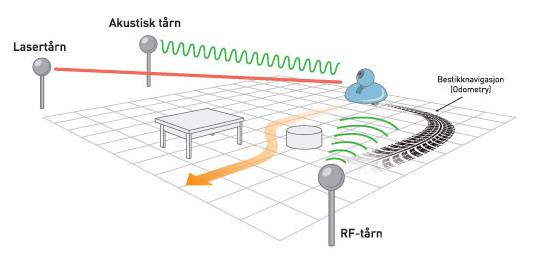
Inne i et rom kombineres gjerne ulike sensorsystemer med utfyllende egenskaper. Man kan for eksempel sette sammen et radiosystem og såkalte akustiske tårn som sender og mottar signaler, samt feste treghetssensor og kamera på selve roboten. Illustrasjon: Knut Gangåssæter
– I stedet for å bruke satellitter må man da bruke en design som tar i bruk systemer med ulike optiske, radiobaserte eller akustiske teknologier, forklarer Fjerdingen. Én løsning er å plassere kunstige satellitter i rommet. Med sensorer på roboten kan roboten da regne ut hvor den er, og orientere seg ut fra dette.
Måler endringer i bevegelse
En annen løsning er såkalt bestikknavigasjon. Ifølge forskerne ble denne løsningen tradisjonelt brukt til sjøs når det var dårlig sikt. Kursen ble bestemt med kompass, og distansen ble beregnet ut fra skipets fart. Beregningene baserte seg på at man hele tiden loggførte data om skipets bevegelser og målinger av fart.
Navigasjon kan også gjøres gjennom at flere treghetssensorer måler akselerasjon og rotasjonshastighet. Moderne båter, fly og romfartøyer benytter slike systemer. Gjennom å måle bevegelse resonnerer systemet seg fram til hva posisjonen er.
Hjulomdreininger på en robot kan også hjelpe til med å beregne posisjon. Om venstre hjul for eksempel har flere omdreininger enn det høyre, har roboten gjort en sving.
Kombinasjoner av metoder
Alle disse metodene er velkjente og greie nok, ifølge Tjønnås, men om man skal basere seg på bare én av dem og samtidig kreve høy nøyaktighet, blir prisen fort veldig høy.
For å få til gode løsninger med høy presisjon kombineres derfor sensorsystemer med utfyllende egenskaper. Man kan for eksempel sette sammen “billige treghetssystemer” med “billige avstandsmålesystemer” og få en totalløsning som er rimeligere, mer nøyaktig og robust mot endringer i omgivelsene.
Lik oppfatning av verden
Tilbake til robotstøvsugeren. Den skal trille over et areal, og det er ikke så farlig om den vet hva som er bord, og hva som er stol – den må bare ikke kollidere med dem. For en slik robot er avstand viktig- men altså ikke konteksten.
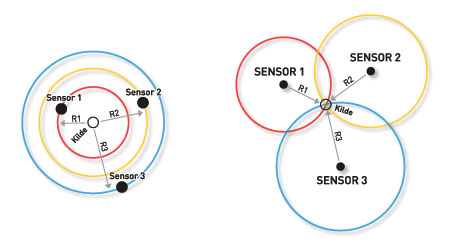
Hvordan finne sin posisjon? Med en måling vet du at du er et eller annet sted langs en sirkel. Med to målinger reduseres løsningene, med det er fortsatt mange alternativer. Tre målinger gir nøyaktig posisjon. På et orienteringskart kalles dette krysspeiling. Illustrasjon: Knut Gangåssæter
– Men dette blir viktig for en servicerobot som skal samhandle med mennesker. Når ansatte i pleie- og omsorgssektoren nå kan tenke seg en robot til rutinearbeid som for eksempel håndtering av skittentøy, kan den få beskjeden: Hent tøyet på vaskerommet, og bring det til sjakten! Da nytter det ikke at roboten lagrer sitt interne kart – for den må ha akkurat samme verdensbilde som du har, sier Sigurd Fjerdingen.
– Verdensbilde?
– Ja, når vi befaler “plukk opp koppen” eller “plasser koppen her”, har vi et kart i hodet. Dette kartet må stemme overens med robotens oppfattelse av verden. Det er vanskelig. Og skal vi få roboten til å gripe, blir det enda vanskeligere.
– Men hva med industriroboter? De griper – og flytter jo på ting?
– Riktig. Men de er fastmonterte og har en bestemt posisjon. Og tingen som skal gripes, har kanskje også en lett gjenkjennelig posisjon …
Billigere med moduler
De to SINTEF-forskerne har fått penger til å drive et internt studium av lokalisering og prøver nå å jobbe mot å finne rimeligere løsninger. Tjønnås og Fjerdingen mener at om man velger å lage en ny robot og planlegger lokalisering helt fra starten, blir innsatsen stor. Da utvikler det seg til en omfattende engineeringjobb med en ditto stor utviklingskostnad.
– Om man derimot hadde et basissystem som kunne tilpasses etter bruk, ville det hjelpe. Vi ser for oss noen moduler som kan plugges og kobles etter behov. Først må vi lage en demonstrator og få til en plattform å bygge videre på, så får vi se, sier forskerne.
– Om vi kan slippe å gå gjennom den samme utviklingsprosessen hver gang, kan dette bli noe som flere kan bruke.