Møt oppdrettsbransjens nye vaktmester
Denne ROV-en kan operere helt på egen hånd og følger med fiskens oppførsel og helse med argusøyne – uten å skremme den. I tillegg inspiserer den merdens tekniske tilstand. Hils på Mr. Cage Reporter.
Oppdrettsfisk er en viktig kilde til mat – over hele verden. Men bransjen er kjent for utfordringer knyttet til sikkerhet, både i form av hyppige arbeidsulykker og rømming av fisk. Oppdrettslaks på avveie og medfølgende spredning av uønsket genmateriale til sårbare villaksstammer er et kjent problem. I tillegg har oppdrettsbransjen i dag liten tilgang til skreddersydde systemer som kan overvåke merden kontinuerlig, og samtidig samle inn viktige data fra alt som skjer i merdene.
Men rent teknologisk finnes løsningene. Automatiserte undervannsfartøy kan ta seg av høyrisikojobber som inspeksjon av nettene, og avlaste dykkere. Det kan gjøre ulykkene færre, overvåke fiskens helse og hindre rømming. Ikke minst kan denne typen utstyr gjøre anleggene mer lønnsomme fordi det kan være “på vakt” døgnet rundt, til tross for elendig vær, og uten menneskelig assistanse. Samtidig kan utstyret utføre kompliserte oppgaver som å inspisere merdene for mulige skader i sanntid – og dermed hindre rømming og øke dyrevelferden.
Testet i oppdrettsanlegg
Nå har et knippe forskere fra SINTEF og NTNU gått sammen med både oppdrettsbransjen og industrien om å utvikle en selvkjørende, altså autonom, undervannsrobot (ROV) som har fått navnet CageReporter. Den er skreddersydd for slike oppgaver – og gjør jobben helt på egen hånd.
Prosjektets resultater:
- Et lavkost undervannssystem for kommunikasjon og posisjonering
- Et nytt system for 3D-syn, som gir høykvalitets datafangst og mulighet for dataanalyse
- Et nytt system for autonom navigasjon/manøvrering i bevegelige omgivelser, med minimalt behov for overstyring.
- Mulighet til å overvåke forholdene i merden for å øke fiskevelferd og helse, samt enklere inspeksjon av nettet.
- En konseptstudie som har resultert i anbefalinger og spesifikasjoner for en tilhørende dokkingstasjon i oppdrettsanlegg.
- Følgende rapporter:
Underwater Communication and Position Reference System - OC2020 A-034
Data capture and real-time data quality analysis - OC2020 A-033
– Slike fartøy kan også samle nyttige data, gjøre dette mer nøyaktig og mer objektivt enn vi mennesker klarer. Dermed gir teknologien oss svært presis og viktig informasjon om for eksempel fiskens helse og vannkvalitet i sanntid. Det er gode nyheter for fiskehelsa og dyrevelferden. I framtida kan vi kanskje se for oss ubemannede oppdrettsanlegg, sier forsker og prosjektleder Eleni Kelasidi i SINTEF.

Dette er SINTEFs feltlaboratorie for oppdrettsteknologi, ACE, som ligger på Trøndelagskysten. Her har CageReporter gjort sine første oppdrag. Foto: SINTEF
Så langt er ROV-en testet i felt på to oppdrettsanlegg hos SINTEF ACE utenfor Frøya på Trøndelagskysten. Anleggene driftes av SalMar, men fungerer samtidig som et felt-laboratorium for SINTEF-forskerne. Her har roboten både levert sylskarpe sanntidsbilder fra innsiden av merden, og presise posisjoneringsdata, slik at den kan navigere i omgivelser som stadig forandrer seg. CageReporter kan dermed avsløre eventuelle deformasjoner i nettet – og forutse mulige skader.
– Det vi fikk av data fra fiskemerden, både når det gjald fisken, utstyret og miljøet, ga oss mye større innsikt i hvordan forholdene i merden faktisk er. Sammenliknet med tradisjonelle punkt-målinger fikk vi rett og slett mye mer informasjon, og ikke minst mer presis informasjon, sier forskeren.
Bevæpnet med sensorer og kunstig intelligens
Cage Reporter er nemlig utstyrt med svært robust teknologi: Et kommunikasjonssystem som baseres på akustiske signaler, og samtidig er lite nok til at det ikke påvirker ROV-ens “kjøreegenskaper” i vannet.
Selve kommunikasjonssystemet er utviklet av det norske gründerselskapet Water Linked, som har utviklet et ultralydbasert signalsystem til undervannsbruk som både er lite, rimelig og høyteknologisk.
– Vi oppdaget at det var et stort marked for denne typen utstyr, fordi det kommunikasjonssystemet som var tilgjengelig i markedet for sju år siden da vi startet, var både stort og krevde mye energi i drift, sier daglig leder Oliver Skisland i Water Linked.
Denne behovsidentifiseringen resulterte i et sju år langt forskningsløp, og i dag opplever bedriften stor suksess med sine løsninger. En del av denne suksessen er at de står for en viktig del av leveransen til det SINTEF-ledede prosjektet CageReporter, med sitt miniatyriserte signalsystem.
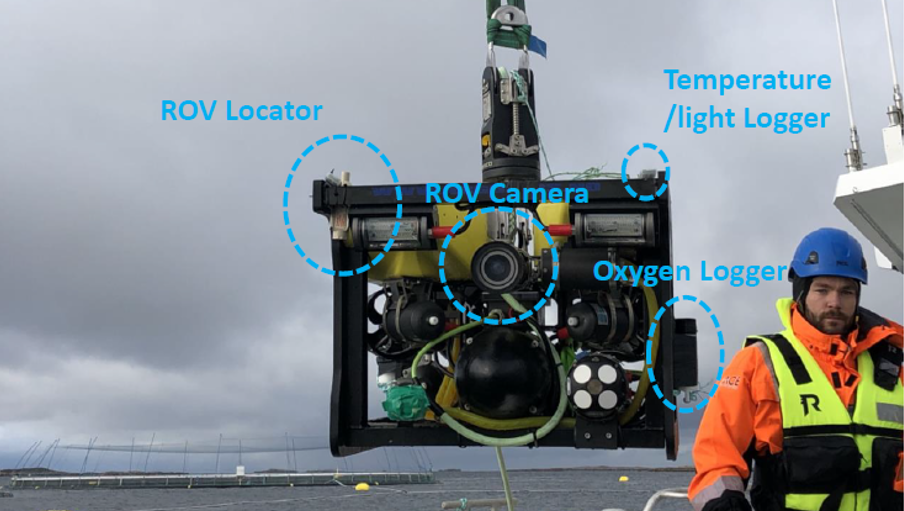
CageReporter er spekket med teknologi og sensorer som får med seg det meste. Bilde tatt på tokt av SINTEF.
– For oss har det vært helt essensielt å ha et presist og lite system for posisjonering under vann. Uten dette kan ikke en ROV klare å navigere på egen hånd. I SINTEF har vi utviklet flere avanserte metoder for sanntids-beregninger av for eksempel deformasjoner i nettet i merdene og interaktiv navigasjon av denne typen fartøy. Nå har vi demonstrert at roboten faktisk gjør jobben, sier Kelasidi.
Forskerne gjorde den selvkjørende
Selve forskningsoppdraget i prosjektet har vært å gjøre farkosten autonom, gjennom å gi den både hjerne, tredimensjonalt syn og ulike sensorer som kan overvåke miljøet. Farkosten er nødt til å eksistere sammen med levende fisk og bevegelige omgivelser, og derfor må den kunne bruke sansene sine til å navigere og regulere seg selv.
– Dette har vært krevende, forteller forsker Eleni Kelasidi. Teamet utviklet en rekke algoritmer som kan estimere avstanden til og bevegelsene av ulike objekter – både selve nettet i merden og fiskene som svømmer i den. Modellene ble kombinert med sanntidsmålinger fra posisjoneringssystemet for å kunne estimere omgivelsene og justere bevegelser i sanntid.
Kelasidi forklarer at disse algoritmene ble da programmert inn i kjøretøyet, som var satt sammen av ulike sensorer og kamera. Dataene de fikk samlet inn ble analysert via datasystemer og kunstig intelligens for å kunne gi en status av fiskene og deres miljø.
Men å få disse systemene og algoritmene til å virke sammen på egen hånd og helt presist, og gjøre dette om til robotens bevegelser – uten å skremme fisken, er vanskelig.

Roboten har sylskarpt “blikk” og kan overvåke fiskens oppførsel og eventuelle skader den har, uten at fisken blir skremt. Foto: Sealab
– Når fisken blir skremt kan fluktinstinktet slå inn, og det gjør at man ikke får den observasjonen man trenger. Det har derfor vært viktig å “lære” roboten å senke farten når det er nødvendig, slik at fisken aksepterer den som en del av miljøet, forklarer Kelasidi.
Etter at ROV-en er akseptert i stimen, kan den ferdes overalt. I de fleste oppdrettsanlegg i dag finnes det sensorer på ett sted: ved fôringstanken. Men forholdene kan være svært varierende gjennom ulike deler av anlegget, temperatur, strømmer, lysforhold og oksygennivå varierer. Med en selvkjørende sensor kan hele anlegget overvåkes, slik at det dannes et mer helhetlig og riktig bilde av forholdene.
Med den kraftige økningen i oppdrettsanlegg som vi ser i dag, er automatisering av inspeksjonene som kreves helt avgjørende for å optimalisere driften, mener forskeren.
Fakta om prosjektet:
Prosjektnavn: CageReporter: Utvikling av teknologi for autonom, biointeraktiv og høykvalitets datafangst i merdrommet
Prosjektdeltakere: WaterLinked AS (Prosjekteier), Sealab AS, Norsk Havservice AS, NTNU, HES-SO and SINTEF Ocean AS (Prosjektleder).
Finansiering: Prosjektet er delfinansiert av Forskningsrådet og industripartnere
Varighet: 01/01/2017 - 31/12/2019
Fasiliteter: SINTEF ACE