Lager systemer som forstår Arktis
Hvordan kan fartøyer som ferdes i Arktis holde seg i ro når havisen presser dem i ulike retninger?
Ferdsel i farvann med is kan være en krevende affære. Isen på havet er lumsk og i konstant bevegelse, isfjell kan komme drivende og gjøre stor skade, og kraftige polare vinder oppstår brått og uventet.
Samtidig øker skipstrafikken i arktiske områder innen både shipping, forskning og turisme. Olje- og gasselskapene snuser også på nordområdene.
Øivind Kåre Kjerstad er postdoktor ved Universitetssenteret på Svalbard (UNIS) og NTNU, og forsker på operasjoner og styring av båter i is og ekstremvær. Resultatene han kommer fram til, kan gjøre at flere båter klarer å fullføre kompliserte operasjoner under ekstreme forhold i arktiske farvann.
Ligge i ro uten anker
– Jeg jobber med dynamisk posisjonering i is og ekstremvær. Teknologien brukes i hovedsak til å holde en båt i ro over et punkt på sjøbunnen. Ved operasjoner i Arktis er det ofte en hel flåte med skip som samarbeider om kompliserte operasjoner. Da må de holde seg samlet, og det er viktig at alle skipene jobber sammen og har den nødvendige informasjonen om isforholdene, forklarer Kjerstad.
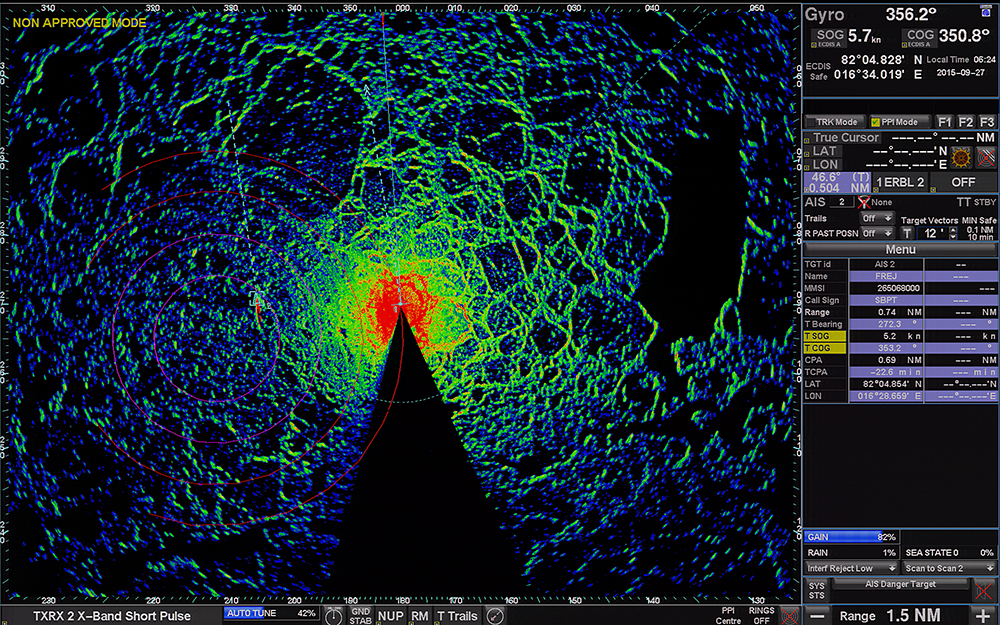
Slik ser radaroperatørskjermen ut, ombord på Oden. Denne viser issituasjonen i nærområdet rundt skipet. Foto: SAMCoT
Se for deg at et skip eller en annen flytende konstruksjon skal ligge i ro uten bruk av anker. Det er ikke nødvendigvis så lett i områder der isen kan drive fort med store krefter og presse fartøyet i andre retninger. Kraften fra isen kan variere veldig, fra ingenting i det ene øyeblikket til voldsomt i det neste. Samtidig kan været skifte raskt.
Dynamisk posisjonering (DP) er å holde fartøyet på plass ved hjelp av skipets egne propeller, ror og thrustere. Dette gjøres automatisk ved hjelp av et kontrollsystem som flere ganger i sekundet beregner kreftene som skal til for å kompensere for miljøet og justerer fartøyet tilbake i ønsket posisjon.
Øke operasjonsvinduet
Kjerstad og hans forskerkolleger lager matematiske beregninger basert på informasjon om blant annet istykkelse, iskonsentrasjon, bølger, vind, akselerasjon og posisjon. Forskerne analyserer beregningene ved hjelp av teori, før algoritmer for å kompensere for miljøkreftene designes og kodes inn i DP-systemet.
Først testes algoritmene på en simulator, deretter på skipsmodeller i laboratorieforsøk, og til slutt om bord på virkelige fartøyer. Resultatene som forskerne kommer fram til, kan øke operasjonsvinduet til fartøyer som opererer i Arktis, slik at de slipper å avbryte oppdrag.
– Teknologien er viktig for sikkerhet, økonomi og miljøet. Ved å bruke fartøyet på en bedre måte, oppstår det mindre slitasje og man oppnår samme effekt med mindre bruk av maskineriet, sier Kjerstad, som som legger til at elementer av algoritmene også vil være interessante for fartøy som ferdes på åpent hav.
Varsler isens bevegelser
Som regel har kapteinen om bord på et skip i Arktis et støtteapparat rundt seg under operasjonen. Dette støtteapparatet, et såkalt «ice management team», kan bestå av meteorologer og andre folk som har kunnskap om is eller som har erfaring fra lignende operasjoner.
Videoen viser er en landing med helikopter på isbryteren Oden under Oden Arctic Technology Research Cruise 2012. I helikopteret kommer Prof. Sveinung Løset tilbake etter å ha vært ute å satt ut posisjonssensorer på isfjell. Video produsert av: Wenjun Lu, Sveinung Løset og SAMCoT
Arbeidet til Kjerstad omhandler både direkte styring av båter og beslutningsstøtte. Han jobber blant annet med å utvikle systemer for å måle isens krefter på båten og for å gi informasjon om hvordan isen beveger seg i nærområdet til operasjonen. Til dette arbeidet brukes måleinstrumenter plassert på strategiske steder i skroget, og radar.
For overvåkning av isens bevegelser brukes et sett av posisjonssensorer som fraktes ut med helikopter. De inneholder batterier og kan derfor ikke dumpes i havet, og må hentes inn når de driver ut av operasjonsområdet.
Det er i dårlig vær at behovet for å vite hvordan isen driver er størst, og det er også da helikopterferdsel innebærer størst risiko – eller ikke er mulig i det hele tatt. Forskerne håper derfor at de skal klare å lage systemer som gir kapteinen den nødvendige informasjonen ved kun å bruke sensorer om bord på skipet. Dermed kan bruken av helikopter reduseres betydelig.
Må bruke erfaringer
– Isen kan lage store krefter på båten, og retningen den driver kan endre seg mye på kort tid. Et system som varsler isens bevegelser vil derfor redusere risikoen ved operasjoner i is, og gjøre dem mer robuste, forklarer Kjerstad.

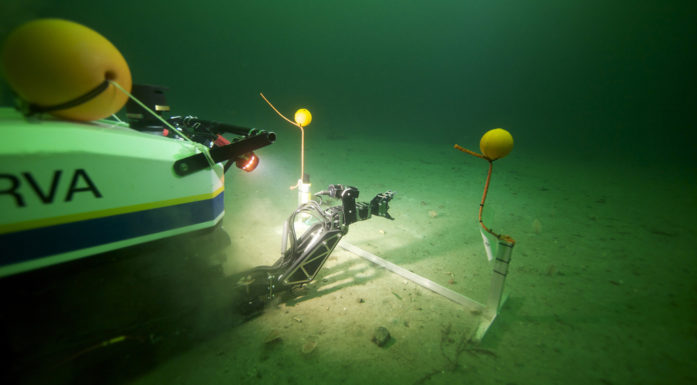
Forskere jobber med å sette ut forankrete sonarer. De skal logge data topografien av isens underside. Foto: Øyvind Hagen, Statoil
I dag finnes ikke gode systemer som gir informasjon om isens bevegelser og isens krefter på båten. Kapteinen må derfor stole på egne eller andres erfaringer med hvordan man opererer fartøyer i islagte farvann.
Dataene som forskerne samler inn, brukes også til å validere simuleringer og eksisterende modeller som brukes til design av skip, systemer og operasjoner. Validerte simuleringsmodeller er spesielt viktig i Arktis, hvor vi har begrenset erfaring og mulighet for eksperimenter, legger Kjerstad til.
Kobles mot autonom teknologi
I dag bruker kapteinen på et skip i Arktis en rekke ulike informasjonskanaler som vurderes kontinuerlig. Kjerstad og kollegene jobber derfor med å bygge ett samlet operasjonsbilde – altså at all nødvendig informasjon gjøres tilgjengelig gjennom ett informasjonssystem.
På sikt kan det kobles opp mot dirkete styring av båten, og mot autonom teknologi – som blant annet kan supplere besetningen om bord og ta over enkelte aspekter av styringen.
Kjerstad er tilknyttet NTNU Sustainable Arctic Marine and Coastal Technology (SAMCoT), et senter for forskningsdrevet innovasjon som NTNU er vertskap for. SAMCoT jobber for å sikre trygge og miljøvennlige marine og kystnære operasjoner i Arktis.
Han samarbeider også nært med forskere ved NTNU Senter for autonome marine operasjoner og systemer (NTNU AMOS). Senteret jobber med å utvikle intelligente havkonstruksjoner og autonome ubemannede skip og andre farkoster.