
Roboter som bor og jobber under vann
Over 70 prosent av jorda er dekket av hav. Stadig mer kritisk infrastruktur legges på havbunnen. Sabotasje og uønskede hendelser øker behovet for inspeksjon og overvåking. Det er kostbart, men kan løses av fastboende roboter på havbunnen.
- Januar 2022: En av to kommunikasjonsfibre til Svalbard blir kuttet.
- 2023 og 2024: I Østersjøen blir både kabler, fiberlinjer og gassrør sprengt eller kuttet. Hendelsene kategoriseres som del av hybrid krigføring.
Større økonomisk aktivitet i havrommet øker behovet for å overvåke og inspisere infrastrukturer under vann mer regelmessig.
– Undervannsroboter kan operere fra faste baser på sjøbunnen, uavhengig av kostbare overflatefartøy. Disse vil spille en viktig rolle for overvåking, inspeksjon og beskyttelse av stadig mer infrastruktur på havbunnen – over hele verden, sier professor Martin Ludvigsen ved Institutt for marin teknikk (IMT) ved NTNU.
Autonome undervannsfarkoster kan overvåke og inspisere rørledninger, kabler og undervannsinstallasjoner, blir viktig i en utrygg verdenssituasjon. I tillegg trenger vi mer kunnskap om sjøbunnen og havrommet.
I dag utføres overvåking og inspeksjoner fra store skip med sonarer for brede skanninger fra overflaten, eller undervannsfarkoster som følges av skip og styres fra kontrollrom på moderfartøy eller land. Fellesnevneren er store og kostbare fartøy på overflaten, og mange mennesker involvert. Leie av skip med mannskap er svært dyrt og CO2-utslippene er betydelige.
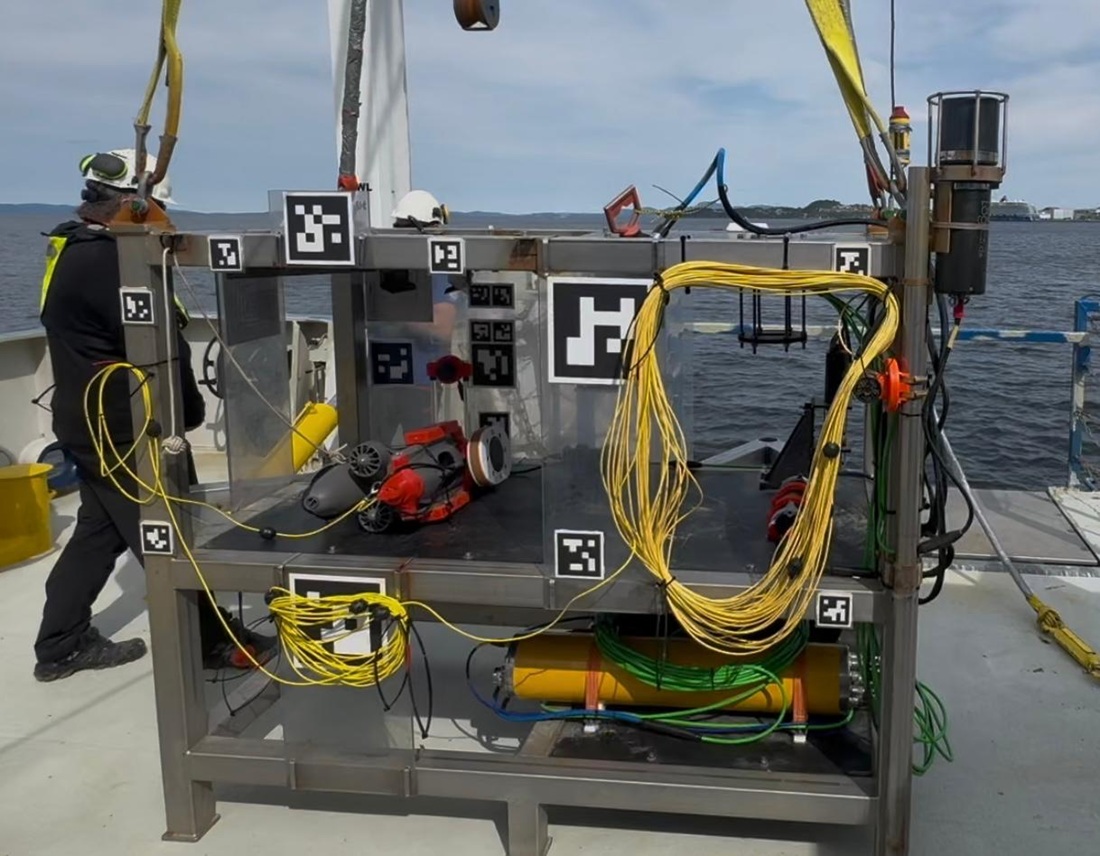
Dokkingstasjonen på dekk til RV “Gunnerus” før den ble senket ned på 90 meters dyp. Foto: Leonard Günzel, NTNU
«Hus og hjem» på 90 meters dyp
Et alternativ som utvikles nå er altså autonome undervannsroboter. Disse kan operere i mange måneder eller år i strekk på havbunnen, uten å tas opp til overflaten eller til land.
Forskere fra NTNU har nå gjennomført vellykkede forsøk med et selvgående undervannsroboter (AUV- Autonomous Underwater Vehicle) med dokkingstasjon på 90 meters dyp.

Blueye-roboten laget dette 3D-bildet av dokkingstasjonen på 90 meters dyp. Illustrasjon: NTNU
Uten inngripen fra mennesker, foretok isnpiserte roboten infrastruktur. Den fant tilbake til dokkingstasjonen der den koblet seg til for å lade batterier og dumpe innsamlet data.
– Testene representerer viktige skritt på veien til helautonome operasjoner over lengre tidsrom, sier Leonard Florian Tom Günzel, doktorgradsstipendiatved NTNU IMT.
Han forteller at motivasjonen for å utvikle fastboende undervannsroboter blant annet er å få ned kostnader og dermed gjøre teknologien tilgjengelig for flere brukergrupper. En annen viktig grunn er sikkerhet for sjøfolk og miljø.
Enklere og rimeligere
I årevis har det vært snakket om å utplassere AUV-er for mer eller mindre konstant tilstedeværelse rundt olje- og gassinstallasjoner. Det finnes allerede noen få store og avanserte systemer. De mange hendelsene med sabotasje mot infrastruktur, kommunikasjonsfibre, ledninger og rør, vil øke etterspørselen etter flere og enklere løsninger.
Fortsatt gjenstår det både forskning og utvikling for å komme helt i mål med solide og ikke altfor kostbare løsninger.
– Grunnlaget er beredt og første skritt er tatt for å utvikle og sette ut fullskala autonome undervannsroboter med dokkingstasjon for lading og sending av data, sier Ludvigsen.
De viktigste oppgavene er å utvikle systemer med dokking som er robuste og holdbare. I tillegg er det utfordringer som må løses med hensyn til autonomi, navigasjon, dokking, kommunikasjon samt holde posisjon, retning og kurs under vann.

Forskerne som utførte autonomiprosjektet. Fra venstre mot høyre: Ambjørn Grimsrud Waldum, Leonard Günzel, Gabrielė Kasparavičiūtė, Ai-Nhi Hoang, Jenny Krokstad, Md Shamin Yeasher Yousha, Dana Yerbolat og Abubakar Aliyu Badawi. Ikke til stede da bildet ble tatt: Martin Ludvigsen, Celil Yilmaz, Mahmoud Hussein Abdelrazik. Foto: NTNU
Blueye-robot
NTNU-testene utførte forskerne med en Blueye X3 undervannsrobot på ca. 10 kg. Den ble spesialutrustet for de spesielle testene. Roboten var blant annet utstyrt med kamera, sonar, sensorer, kommunikasjonsutstyr og induksjonslader samt magnetisk «fortøyning».
Ludvigsen og Günzel påpeker at NTNU med denne testroboten får en plattform som kan benyttes av både studenter, doktorgradsstipendiater og selskaper.
– Vi har fått fram et verktøy for videre utvikling, testing og modning av teknologi som etter hvert kan kommersialiseres, sier Günzel.
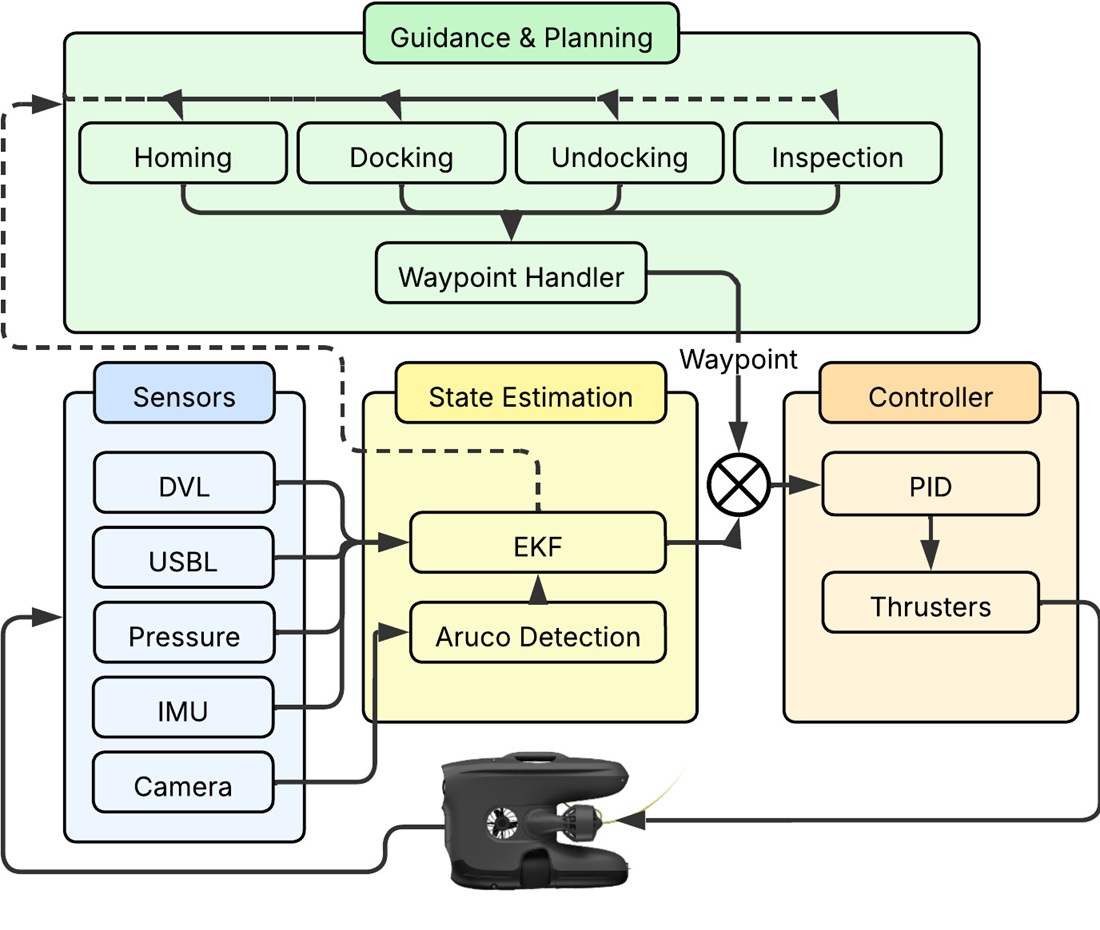
Skjematisk framstilling av programvare og styringssystem for undervannsroboten. Illustrasjon: Leonard Günzel, NTNU
Testa i Trondheimsfjorden
Testene er utført ved NTNUs eksisterende infrastruktur i Trondheimsfjorden. En spesialutviklet dokkingstasjon ble satt på 90 meters dyp.
For at roboten skulle finne dokkingstasjonen og posisjonere seg riktig, benyttet forskerne en kombinasjon av akustiske lav data-rate kommunikasjon og navigasjon (Ultra Short Baseline (USBL) og markører som leses og tolkes med kamera og maskinsyn for å guide AUV-en inn i stasjonen.
Over korte avstander kan den også fjernstyres og utveksle data via et optisk modem. Dokkingstasjonen er koblet til land via kabel for strøm og kommunikasjon.
Så snart AUV-en er dokket, kan data overføres via høyfrekvent båndbreddekommunikasjon og farkosten lades med induksjon. Dette er utstyr som allerede er utviklet i Norge.
AUV-en har hittil vært utplassert i to omganger med til sammen fire uker operativ funksjon. Systemet fullførte inspeksjonsoppdrag og oppnådde en autonom dokkingsuksessrate på 90 prosent. Den må opp i 100 prosent. Nye tokt er planlagt i løpet av våren.
– Dokking er svært kritisk. Uten operatør er konsekvensen av feil mye større. Hvis farkosten ikke finner tilbake til dokkingstasjonen, er den tapt, sier Ludvigsen.
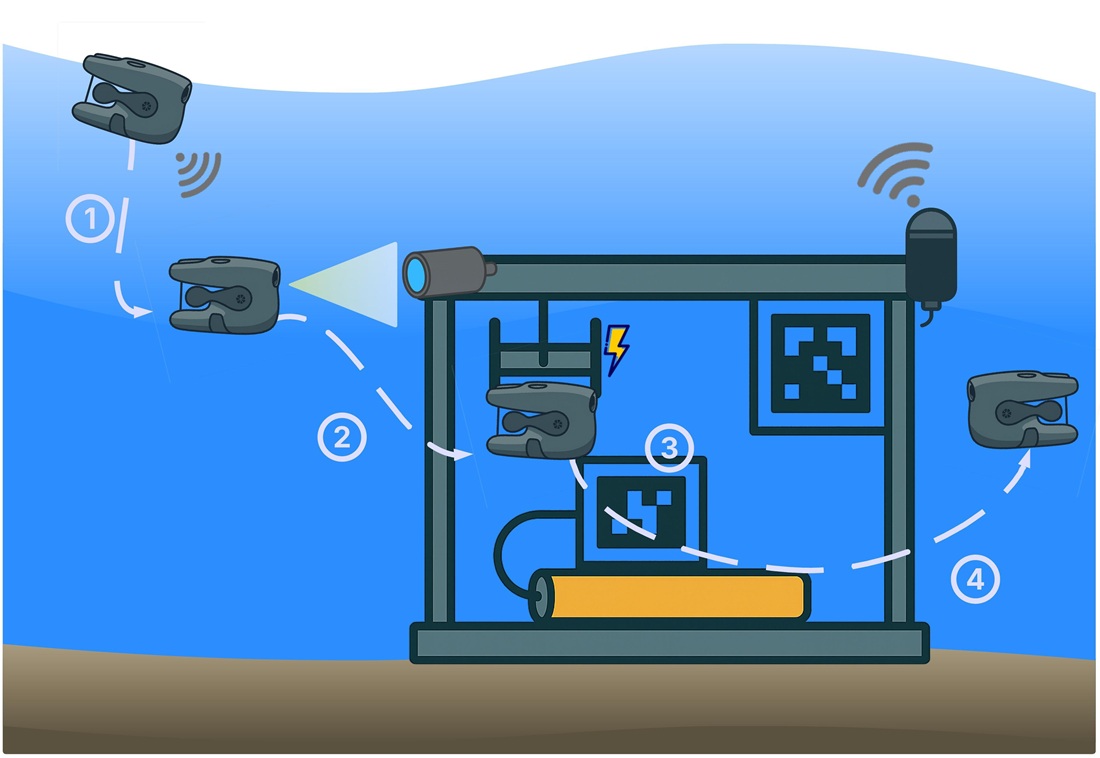
Undervannsroboten bruker en blanding av akustisk- (1) og visuell navigasjon (2) før den dokker og lader samt dumper innsamlede data. Illustrasjon: NTNU
Sikring under testing
Navigasjon på land eller havoverflaten er relativt enkelt. Med GPS og andre satellittsystem, har man tilgang på posisjonsdata.

Leonard Florian Tom Günzel, doktorgradsstipendiat ved NTNU IMT, mener at mindre og enkle fastboende undervannsroboter er nær kommersialisering. Teknologien blir tilgjengelig for flere brukergrupper. Foto: NTNU
Under vann er ikke det mulig. Derfor benyttes kombinasjoner av flere teknikker til å beregne posisjon og rute, deriblant gyroskop- og akselerometer (INS – Inertial Navigation System) samt akustikkbasert system (DVL – Doppler Velocity Log). Navigasjonssystemene krever mye regnekraft og dermed strøm.
Testene med Blueye X3 ble gjort med en kabel som sikring. Videre arbeid blir også utført med kabel inntil en robust autonom løsning er på plass. Det kan fortsatt ta noe tid, selv om kunstig intelligens (KI) bidrar til å finne gode løsninger raskere.
Blant de største gjenstående utfordringene er å gjøre roboten selvstendig – det vil si at den «forstår» og «tenker» slik at den kan ta egne beslutninger ut fra observasjoner av omgivelsene. Forsøkene viser at fisk som svømmer forbi kameraet, skaper trøbbel for programvaren som tolker bildene.
– Det er vi i gang med å løse, sier Günzel.
Et stykke igjen ennå
Ludvigsen sier at det fortsatt er et stykke fram til en kommersiell løsning er på plass, men han er optimist.
Professor Martin Ludvigsen mener NTNU-prosjektet viser at det er mulig å benytte autonome, fastboende undervannsroboter til en rekke oppgaver. Det blir billigere og enklere å inspisere og overvåke infrastruktur på havbunnen. Foto: Berre
– Testene viste at denne løsningen fungerer og operasjonene er repeterbare. Autonome fastboende farkoster er en skalerbar og kostnadseffektiv løsning for undervannsovervåking, sier Ludvigsen.
Prosjektet har fått støtte fra Norges Forskningsråd. Det er utført som del av forskningsprosjektet Safeguard og NTNU Centre for Autonomous Robotics Operations Subsea (Vista CAROS) støttet av Det Norske Vitenskaps-Akademi og Equinor.
Referanse: Leonard Günzel, Gabrielė Kasparavičiūtė, Ambjørn Grimsrud Waldum, Bjørn-Magnus Moslått, Abubakar Aliyu Badawi, Celil Yılmaz, Md Shamin Yeasher Yousha, Robert Staven, Martin Ludvigsen. Docking and Persistent Operations for a Resident Underwater Vehicle. ArXiv. Robotics. arXiv:2602.16360. https://doi.org/10.48550/arXiv.2602.16360




