Dyp læring kan hindre lakserømming i røff sjø
Kunstig intelligens kommer til nytte under vann når SFI Exposed og SINTEF utvikler løsninger for å øke sikkerheten i fiskeoppdrett under røffe forhold.
Du har kanskje hørt om dyplæring? Det er sentralt innen maskinlæring, der datamaskiner utvider kunnskapen sin ut fra det den blir matet med. Ved å gå igjennom eksempler på det den skal forstå, kan maskinhjernen lære ved å gjenkjenne sammenhenger. I en datastruktur inspirert av den menneskelige hjernen, blir enheter knyttet sammen i noe som kalles et nevralt nettverk. Når disse nettverkene har mange lag, er vi inne i det som kalles dyp læring.
Dette har vi brukt for å utvikle og forbedre systemer som kan å finne uregelmessigheter i nettene på fiskemerder. Vi mater et digitalt nevralt nettverk med bilder av hvordan byggesteinene i en intakt not ser ut, slik at programmet kan reagere når det ser noe uvanlig – for eksempel et hull.
Rømning er et hovedproblem
Hyppige inspeksjoner av dette nettet som henger under vann, skal forhindre at fisk rømmer. Oppdrettsfisk på avveie kan bære smitte eller gå opp i elvene med vill fisk og forstyrre og delta i gyting. Alt dette kan svekke de ville laksestammene, og rømning er noe alle vil unngå. Regjeringen varslet nylig at de vil innføre tøffere krav til rømningssikker utforming og drift av oppdrettsanlegg. Det nye tekniske regelverket kan gjøre det tydelig at vi trenger å tenke nytt. For eksempel kan konseptene vi har jobbet med i forskningssenteret SFI Exposed tas i bruk, eller videreutvikles.
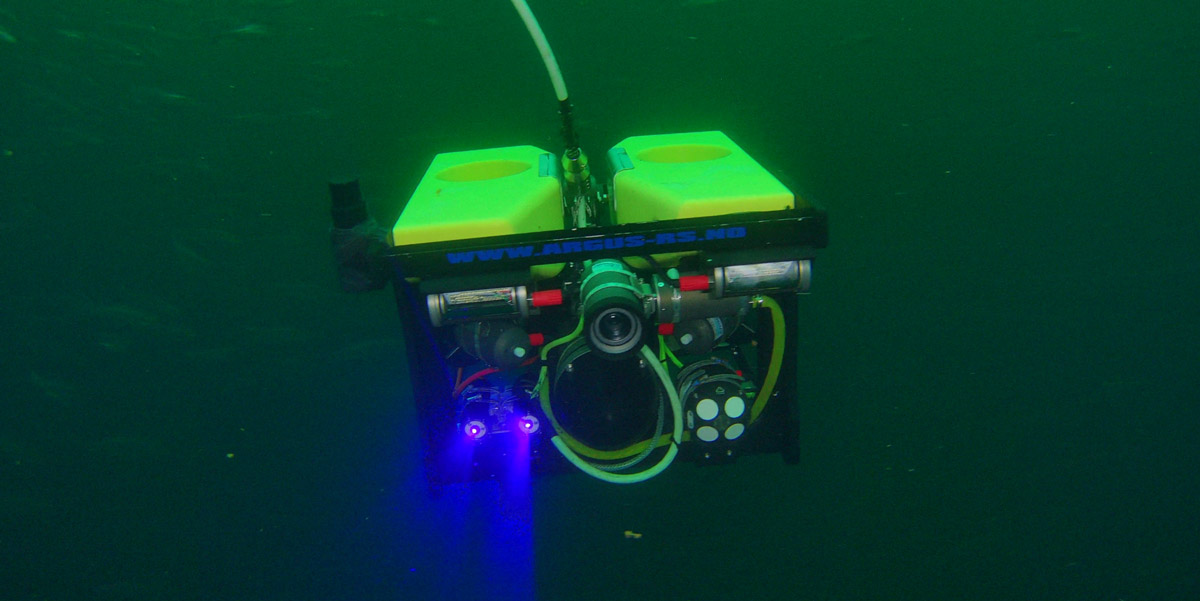
Dagens standardløsning er at en fjernstyrt undervannsfarkost (ROV – remotely operated vehicle) med kamera settes ned i merda og at en operatør ser på inspeksjonsbildene. Det er vanskelig å holde seg skjerpet når du sitter i time etter time og ser på monotone videobilder av nettmasker under vann. En datahjerne blir derimot aldri lei eller trøtt, og dette er materie som er godt egnet for autonomi og bildegjenkjenning.
Datahjernen bedre egnet enn menneskehjernen
Uansett om bildene skal vurderes av mennesker eller maskiner, trengs det altså videofilm av selve notveggen. Det er teknisk krevende å styre en ROV ved en bevegelig notvegg, der kameraet må komme nært nok til å få klare bilder, men for all del ikke skal kollidere med nota.
Våre forskerkolleger som jobber med autonome systemer og teknologier for fjernoperasjoner, har undersøkt hvilken sensorteknologi som sammen gjør det mulig for ROVen å bestemme sin egen plassering i merda. Det gir kontroll på hvilken del av notveggen som til enhver tid blir inspisert.
At ROVen vet hvor den er, er en forutsetning for alle typer autonome operasjoner med ROV, enten det gjelder å holde den i ro på tross av strøm og bølger, eller om vi ønsker at ROVen skal følge notveggen med en gitt, fast avstand.
Resultatet har blitt et laserkamerasystem for notrelativ navigasjon. Ved hjelp av to parallelle laserlinjer som lyser på notveggen, innhentes informasjon om avstand til og vinkel på nota. Disse målingene er essensielle dersom ROVen skal holde passende avstand til notveggen uten at operatøren må styre hver gang nota flytter seg på grunn av strøm eller bølger. Det foregår mye spennende forskning og utvikling på autonome robotoperasjoner, både i forskningsinstitutt og i industrien. Vi i SINTEF ser at dette er starten på ei fremtid med løsninger som kan forbedre havbruksoperasjonene.
Den farlige nærkontakten
SFI Exposed har mange forskningsområder som ser ulike perspektiv ved eksponert oppdrett. Våre sikkerhetsforskere har avdekket at det kan være overlapp mellom hendelser som øker risiko for rømming og hendelser som utgjør en fare for de ansatte. Vi mener det er viktig å tenke helhetlig på sikkerhet. Det vil være effektivt å legge inn dette hensynet allerede i produktutviklingsleddet. Dersom sikkerheten bygges inn i teknologien slik at det ikke er mulig å utløse farer ved feil bruk, har man effektivt redusert risikoen for hendelser som fører til rømning eller skader.
Når vi er inne på risiko: En ROV stiller selvsagt ingen HMS-krav, men det bør gjøres for personellet som skal plassere den i merda – og få hentet den opp igjen. Oppgaven kan høres enkel ut, men krever at et skip med kran legger til og fortøyer til merda. I mange tilfeller må personell ut på flyteringen for å sjøsette ROVen med en del plunder og heft. Det er generelt risikofylt å bevege seg mellom båt og merd, og mange av ulykkene i næringa skjer nettopp i slike situasjoner. På steder med mer strøm, bølger og vind med tilhørende større bevegelser og akselerasjoner – og der båter og anlegg vil være enda større – må man ha løsninger som gjør det trygt å forflytte seg mellom skip og merd.
Robotarm kan gjøre jobben
Vi har studert kranoperasjoner som utføres i dag, for å vurdere risikofaktorer og utfordringer. Deretter har vi identifisert teknologiske muligheter for forbedring. Konseptstudier for «Launch and Recovery» av ROV i merd er ett eksempel, et konsept hvor en avansert robotarm kan sørge for at operasjoner lar seg utføre uten kontakt mellom båt og merd er et annet. Se for deg at båten som robotarmen er festet i gynger opp og ned på bølgene, og at merda gjør det samme – i utakt – et stykke unna. En robotarm som skal kunne strekke seg ut fra båt og over til merd for å utføre presisjonsarbeid der ute, må åpenbart være en rimelig høyteknologisk sak. Men det er faktisk mulig.
Vi har demonstrert i modellforsøk hvordan robotarmen kan kompensere for båtens og anleggets bevegelse. Videre har vi vurdert hvilke operasjoner som kan la seg utføre og eventuelle endringer som må gjøres på dagens anlegg for å ta denne teknologien i bruk.
Bedre beslutningsstøtte
Risiko for ulykker og rømningshendelser kan øke når forholdene på sjøen blir dårligere enn forventet, for eksempel i form av overraskende sterk strøm eller ruskevær med for kraftige bølger. I dag baserer man seg ofte på skjønn og erfaring når man vurderer om operasjonen skal avbrytes eller ikke. Klarere operasjonsgrenser, altså retningslinjer for når det er forsvarlig å gjennomføre operasjoner og ikke, kan være verdifullt for sikkerheten. Vi i SINTEF Ocean har bygd infrastruktur for datafangst fra bøyer, anlegg og fartøy og hentet inn meteorologiske målinger samt målinger av vannets bevegelser og kvalitet for å bygge solid statistikk. Jo mer presis informasjonen er om bølge-, strøm- og værforhold, desto lettere er det å fatte en beslutning om en operasjon kan gjennomføres eller ikke. Når vi kobler statistikken med fysiske målinger og digitale tvillinger får vi et svært godt grunnlag for operasjonsplanlegging.