Slik finner ny teknologi skipsvrak på havets bunn
På havbunnens skipskirkegårder verden over ligger anslagsvis 3 millioner skipsvrak. Hele 1000 av dem omkring Svalbard. Ny teknologi bringer unike historier og kunnskap opp til overflaten.
Opp gjennom århundrene har skipsfarten møtt sine utfordringer som kriger, uvær, isfjell, pirater for å nevne noe. Mange skip har gitt tapt mot sterkere krefter og gått ned med mus og mann. De ligger på havets bunn med sine historier og hemmeligheter, og der har mange av dem ligget lenge, utilgjengelige for andre enn fisk og andre skapninger i dypet.
– Verdenshavene er som et stort museum, sier Øyvind Ødegård. Han har nylig disputert med avhandlingen «Towards Autonomous Operations and Systems in Marine Archaeology».
– Det er en fantastisk teknologisk utvikling som har skjedd de siste årene. En dykker kan kun jobbe ned til 30 meters dyp, og de aller fleste skipsvrak ligger dypere enn dette. Undervannsrobotikk, sensorerer, roboter og kontrollsystemer gjør det nå mulig å gi en helt ny innsikt i hva som finnes på havbunnen.
Jakten på den hellige gral
Mellom Svalbard og Grønland ligger omlag 1000 vrak på havbunnens skipskirkegård. 17 av dem ligger i Smeerenburgfjorden. De interesserer Øyvind Ødegård (bildet) temmelig mye.
 – En eller annen plass der ligger 17 skipsvrak samlet på bunnen. Det er gralen som jeg jakter på, sier han.
– En eller annen plass der ligger 17 skipsvrak samlet på bunnen. Det er gralen som jeg jakter på, sier han.
Bakgrunnen for hvordan de havnet der er som følger:
Hvalen var lenge en svært ettertraktet råvare, og de nordlige farvannene i Arktis, omkring Svalbard, Jan Mayen, Island og Grønland, var rike på hval. Det gjorde at skip og folk fra mange nasjoner inntok disse farvannene som til tider bød på temmelig ekstreme forhold.
Tidlig på 1600-tallet begynte sjøfartsnasjoner som Nederland, Frankrike, Spania og England hvalfangst langs kysten og i fjordene på Svalbard. Nederland ledet an og etablerte den første hvalfangststasjonen helt nord på Svalbard: Smeerenburg. Den fikk tilnavnet «Fettbyen» eller «Spekkbyen» etter hvert som produksjonen av hvalolje tok av.
Solkongen senket skuter
Hvalkokeriene putret og gikk i flere tiår og forsynte Europa med lampeolje, råstoff til såper samt spiler til korsett og paraplyer (bardene til hvalene egnet seg utmerket til dette). Men den intensive hvalfangsten greide på et par-tre tiår nærmest å utrydde hvalbestanden i fjordene og langs kysten.
Dermed måtte skipene dra lenger nordover, mot iskanten, og ut i mer risikofylte farvann. Dette bidro til flere forlis i de ugjestmilde farvannene. En vinter ble 13 nederlandske skip sittende fast i drivis i Sorgfjorden. Mannskapet måtte forlate skipene med hele lasten ombord. Mannskapet overlevde ved å ta seg til Smeerenburg til fots og i småbåter, men hvalskutene forsvant i havdypet.
Det var ikke bare vanskelige farvann som forårsaket forlis. Den ettertraktede råvaren og muligheten til å erobre nytt land, skapte store konflikter og steile fronter, ikke minst mellom Nederland og Frankrike.
Solkongen Ludvig den 14. ville ramme nederlendernes økonomi og deres evne til krigføring, og sendte krigsskip nordover til Svalbard. I 1693 sto det et stort sjøslag i Sorgfjorden mellom to franske fregatter og 40 hollandske hvalfangstskuter, hvor to av dem ble senket på stedet og ytterligere 17 av de hollandske skutene ble tatt med tilbake til Smeerenburgfjorden og senket der. Det er disse Øyvind Ødegård brenner etter å undersøke.
Verdens nordligste skipsvrak

Undervannsroboten HuginHUS AUV på vei ned i dypet. Foto: Geir Johnsen
– Vi har grunn til å tro at det ligger spesielt mange vrak i Arktis, og at disse er godt bevart på grunn av det kalde vannet, sier Øyvind Ødegård.
For to år siden var han på tokt i området, sammen med biologer, teknologer og polarforskere. De undersøkte livet i havet gjennom polarnatten – og de undersøkte et skipsvrak som hittil er verdens nordligste kartlagte skipsvrak, i Isfjorden.
På dette toktet fant forskerne til sin store overraskelse en musling som normalt sett ikke holder til så langt nord, i så kaldt vann. Det lover ikke så godt for skipsvrakene, og kan tyde på at det haster med å få kartlagt dem.
Målet er å få til et større forskningstokt i området hvor de 17 hvalfangstskutene ligger tause på havets bunn.
Enorm teknologiutvikling under vann
For å få til dette, trengs de teknologiske nyvinningene som Ødegård & Co holder på å teste ut.
Undervannsrobotikk og bruken av joystick for å styre operasjoner under vann, er blitt svært presis de siste årene. Kontrollsystemene er avanserte og smarte, og AI (kunstig intelligens) og kraftigere datamaskiner gjør at robotene er i stand til å gjøre mange vurderinger selv.
– De siste årene har det skjedd en enorm utvikling innen undervannsrobotikk og relevant sensorteknologi. I mitt doktorgradsarbeid har jeg sett på hvordan utvalgte plattformer og sensorer kan benyttes i utviklingen av nye metoder for marinarkeologiske undersøkelser med høy grad av autonomi, og foreslår en modell for hvordan slike avgjørelser kan tas uten et menneske i «loopen», sier Ødegård.
Smart sensorteknologi
Tre sensorteknologier er essensielle for å kunne kartlegge skipsvrak på store dyp og med stor presisjon.
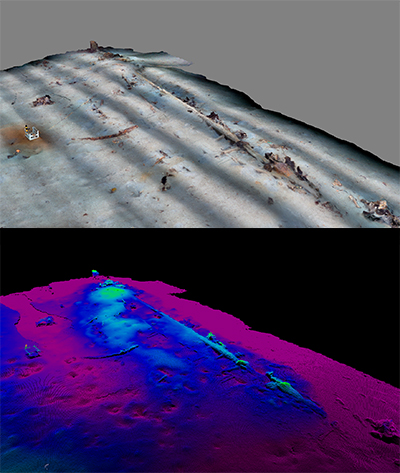
3D-modell av nedbrutt vrak ved Munkholmen i Trondheim havn basert på fotogrammetri. Drapert med fotomosaikk (øverst) og fargekodet punktsky (nederst).
– En syntetisk apertursonar (SAS), som er en høyoppløselig akustisk sensor utviklet av Forsvarets Forskningsinstitutt og Kongsberg Maritime, har på tokt over områder med flere historiske vrak samlet data som representerer kvantesprang i kvalitet og nøyaktighet sammenlignet med tradisjonelle metoder, sier Ødegård.
Denne akustiske sensoren gir bilder med svært høy oppløsning. Detaljerte bunnkart dermed vil kunne gi viktig informasjon uten at inspeksjonsdykk med videokamera er nødvendig for å bekrefte eller avkrefte mulige vrakfunn.
Et annet av verktøyene som forskerne har brukt, er en undervanns hyperspektral avbilder (UHI). Det er en optisk sensor som fotograferer ved å bruke hele det synlige lysspekteret. Vanlige kamera bruker kun tre bølgelengder (RGB), mens en UHI kan bruke opptil 800.
Til sist er stereokamera på en ROV (fjernstyrte undervannsroboter) brukt til å lage høyoppløselige 3D-modeller av utvalgte vrak ved hjelp av fotogrammetri.Oppløsningen er ned på millimeternivå.
– Det gjør at slike modeller er utmerkede for dokumentasjon og overvåking av vrak hvor til og med små detaljer kan være svært viktige.
Disse tre sensorene, og andre sensorer, skal kunne sitte på et og samme undervannsfartøy som helt av seg selv både samler data og analyserer dem. Basert på analysene velger den så om den skal bruke tid på å undersøke og eventuelt dokumentere det som mest sannsynlig er et vrak, eller om den skal dra videre for å kartlegge nye områder.
(Artikkelen fortsetter under bildet).
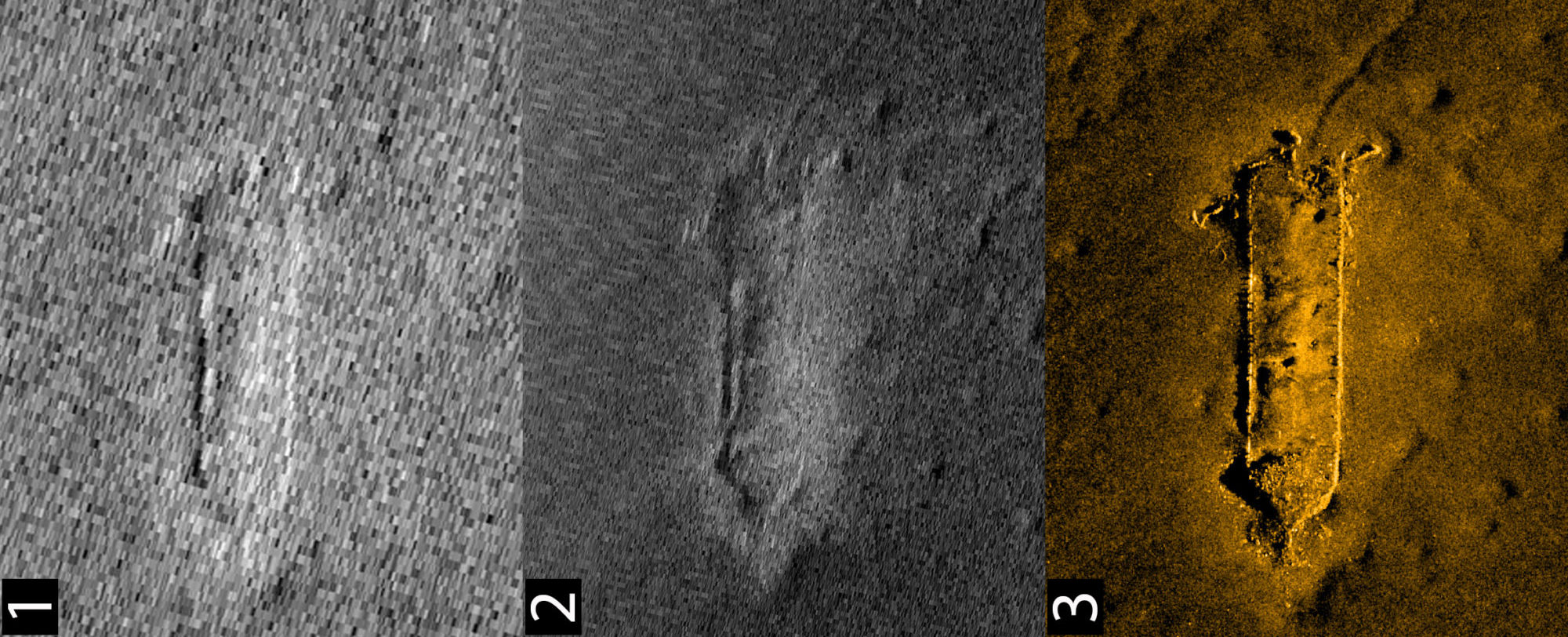
Bilde 1 og 2 viser vrak avbildet med standard sidesøkende sonar. Bilde 3 viser samme vrak avbildet med Syntetisk Apertursonar (SAS). Bilde: Forsvarets forskningsinstitutt
Arkeologer, teknologer og biologer i samme stamp
Øyvind Ødegård har 20 års erfaring som marinarkeolog og jobber ved NTNU Vitenskapsmuseet (VM). I perioden hvor han har jobbet med doktorgraden, har han hatt 75 prosent tilknytning til AMOS, Centre for autonomous marine operations and systems, NTNU.
– For å få volum på forskningen som jeg drev med på VM, foreslo Asgeir Sørensen som leder AMOS, at jeg skulle ta doktorgrad for å kunne bygge opp en studentgruppe omkring tematikken marin arkeologi og teknologi, forteller Øyvind Ødegård .
Han han jobbet i tverrfaglige team sammen med biologer og teknologer, i tillegg til arkeologer.
– Dette har bidratt til at biologer og teknologer har fått øynene opp for undervannsarkeologi. Vi ser at vi har mange felles interesser knyttet til dette, og det er artig og nyttig å jobbe tverrfaglig – selv om det også blir litt spagat innimellom.
Han skal fortsatt dele tiden sin mellom AMOS og Vitenskapsmuseet framover og fortsette forskningen på hvordan teknologi kan hente opp ny informasjon fra havdypet.
Selvgående fartøy er målet

Et utvalg gjenstander typisk for vrak. Målinger i laboratorium dannet grunnlag for et spektralt bibliotek som kan brukes til klassifisering av målinger på sjøbunnen.
– Mye av det utstyret vi bruker, er utviklet ved AMOS og AUR-lab. Vi tester ut nytt utstyr i felten, og slik blir det en vinn-vinn-situasjon mellom de som utvikler teknologien og vi som bruker teknologien til forskning. Vi skal også jobbe videre sammen med Forsvarets forskningsinstitutt som er i forskningsfront på vidtrekkende og kraftige AUVer, forteller Ødegård.
– Det langsiktige målet, er fullstendig autonome langvarige tokt med ubemannede selvgående undervannsfartøy (AUV) hvor vrak kan oppdages, kartlegges og inspiseres med en rekke sensorer for deretter å returnere til overflaten med datasett av høy kvalitet. Vi er ikke helt der ennå, men er blitt overrasket over hvor nært og hvor langt vi er kommet, fastslår Ødegård.
Linker til vitenskapelige publikasjoner om tematikken fra Øyvind Ødegård sammen med andre forskere fra blant annet AMOS:
Underwater hyperspectral imaging: a new tool for marine archaeology
Archaeological use of Synthetic Aperture Sonar on deepwater wreck sites in Skagerrak
A new method for underwater archaeological surveying using sensors and unmanned platforms